NVIDIA continues to push the boundaries of AI-driven robotics with significant updates to its Isaac ecosystem, announced at COMPUTEX 2025. These innovations address key challenges in robotics development by enhancing simulation capabilities, expanding synthetic data generation, and improving model benchmarking across the entire development pipeline.
Isaac Sim 5.0: A New Era in Robotics Simulation
NVIDIA’s upcoming Isaac Sim 5.0, built on NVIDIA Omniverse and OpenUSD, represents a significant evolution in robotics simulation technology. The new version will be fully open and customizable, enabling developers to tailor simulations for specific applications such as synthetic data generation and software-in-the-loop testing.
Key innovations in Isaac Sim 5.0 include:
- Open-Source Availability: Isaac Sim 5.0 will be available on GitHub, making advanced robotics simulation accessible to more developers while offering enterprise support through Omniverse Enterprise licenses.
- NVIDIA Brev Integration: Direct access to NVIDIA GPU instances across major cloud providers, eliminating infrastructure overhead and accelerating iteration cycles through one-click deployments.
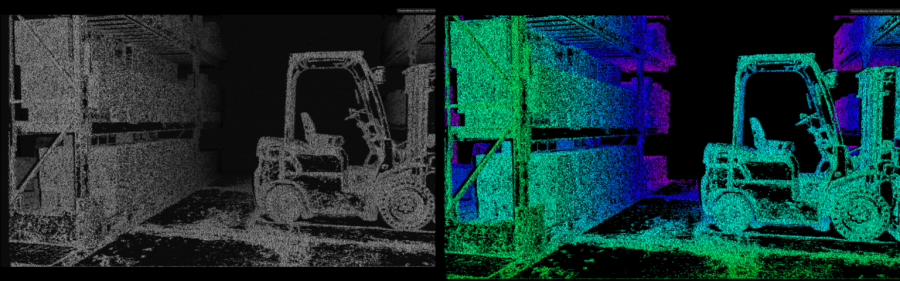
- Advanced Sensor Physics: Enhanced depth sensor simulation with realistic noise modeling for stereo cameras, producing depth images with noise patterns similar to actual sensor data.
- Improved Actuator Models: New joint friction models defined through OpenUSD schemas, developed in collaboration with Hexagon Robotics and maxon, ensure more accurate simulation of real-world robot behavior.
Expanding Synthetic Data Generation Capabilities
Synthetic data generation is crucial for training adaptable robots capable of operating safely in real-world environments. Isaac Sim 5.0 introduces several extensions for advanced synthetic data generation:
- MobilityGen: A specialized extension enabling physics-based data generation for training robot mobility models, including occupancy maps, robot states, poses, velocities, and images.
- Character and Object Simulation: New extensions including Isaacsim.Replicator.Agent for simulating human and robot characters, and Isaacsim.Replicator.Object for generating synthetic datasets for object detection.
- Incident Extension: Produces incident-based data such as fires, spills, or falling objects for emergency response training.
- Caption Extension: Creates image-caption pairs for training vision-language models on scene understanding.
These innovations are complemented by improved data format compatibility with NVIDIA Cosmos world foundation models. The new writer for NVIDIA Omniverse Replicator is specifically optimized for Cosmos Transfer input, allowing seamless generation and export of high-quality synthetic data.
Isaac Lab 2.2: Enhanced Robot Learning Framework
Isaac Lab 2.2 focuses on improving the evaluation and training of robot policies, particularly for humanoid robots. Key updates include:
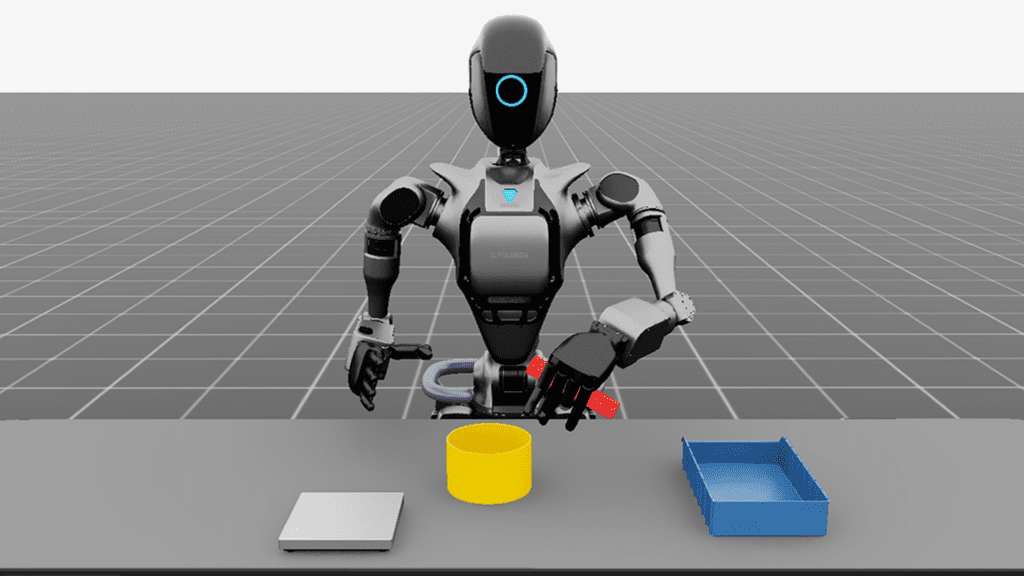
- GR00T N1 Benchmarking: Environment benchmarking scripts for closed-loop evaluation of NVIDIA’s foundation models for robotics, with prebuilt environments and industrial tasks like nut pouring and pipe sorting.
- Enhanced Synthetic Motion Generation: Building on bimanual manipulation capabilities introduced in Isaac Lab 2.1, version 2.2 includes pre-built environments demonstrated at NVIDIA GTC 2025 for collecting synthetic motion data.
- NVIDIA Fabric Integration: Improved performance through NVIDIA Fabric, an Omniverse library that enables efficient creation, modification, and access of scene data between CPU, GPU, and network clients.
- Tensorized Suction Cups: Advanced surface gripper simulation that supports deformable suction cups with the ability to measure grip forces and update parameters in a tensorized fashion.
Standardized Interfaces for Streamlined Workflows
To simplify integration across different platforms, NVIDIA has introduced key connectivity enhancements:
Standardized ROS 2 Interfaces
Developed in collaboration with Robotec.ai, Gazebo, Open 3D Engine, and NVIDIA, these interfaces provide a consistent method to control different simulators through ROS 2.
ZMQ Bridge
An extension added for Isaac Sim 4.5 enabling fast, bidirectional communication with external applications beyond ROS, supporting software-in-the-loop testing with potential for hardware-in-the-loop on edge devices.
Industry Adoption
NVIDIA’s robotics technologies have been embraced by leading companies across the industry:
- Humanoid Robotics: Agility Robotics, Boston Dynamics, Fourier, Mentee Robotics, Neura Robotics, and XPENG Robotics are simulating and validating their humanoid robots using NVIDIA Isaac Sim and Isaac Lab.
- AI Development: Skild AI is using the simulation frameworks to develop general robot intelligence, while General Robotics is integrating them into its robot simulation platform.
- Manufacturing: Taiwan’s leading electronics and robotics manufacturers, including Adata, Advantech, Delta Electronics, Foxconn, Foxlink, Solomon, Techman, and Wistron, are using NVIDIA Isaac Sim and Lab to develop next-generation AI-enabled robots.
Single Architecture for Complete Robotics Development
Both Isaac Sim and Isaac Lab will be fully compatible with NVIDIA RTX PRO 6000 workstations and servers, offering a single architecture for all robot development workloads across training, synthetic data generation, robot learning, and simulation. This unified approach enables developers to move seamlessly from simulation to physical deployment.
NVIDIA Isaac Sim 5.0 and Isaac Lab 2.2 will be available in Q2 of this year, providing developers with powerful new tools to accelerate robotics research and development across multiple robot embodiments.
Future Outlook
These advancements collectively represent a significant step toward reducing the simulation-to-reality gap in robotics development. By improving the fidelity of simulated environments, expanding synthetic data generation capabilities, and enhancing the evaluation of foundation models, NVIDIA is enabling developers to create more capable robots that can safely and effectively operate in complex real-world environments.
The integration of world foundation models with robotics simulation platforms further demonstrates NVIDIA’s commitment to creating a comprehensive ecosystem for AI-powered robotics, from data generation and model training to deployment on physical hardware.