Dm_control — это опенсорс-библиотека на Python для физических симуляций и сред для глубокого обучения с подкреплением. В фреймворке используется MuJoCo физика. Исследователи опубликовали Colab ноутбук с тьюториалом по использованию библиотеки.
Инфраструктура dm_control состоит из следующих компонентов:
- Автогенерируемая обертка MuJoCo на Python предоставляет доступ к основному движку;
- PyMJCF — это модель, в которой иерархия объектов на Python соответствует элементам MuJoCo модели;
- Сборщик — это высокоуровневый игровой движок, который переводит элементы модели в сцены, наблюдения, награды и общую игровую логику;
- Фреймворк Locomotion представляет ряд абстрактных сущностей сборщика, как Arena и Walker, которые облегчают работу с задачами на передвижение
Доступные среды включают в себя:
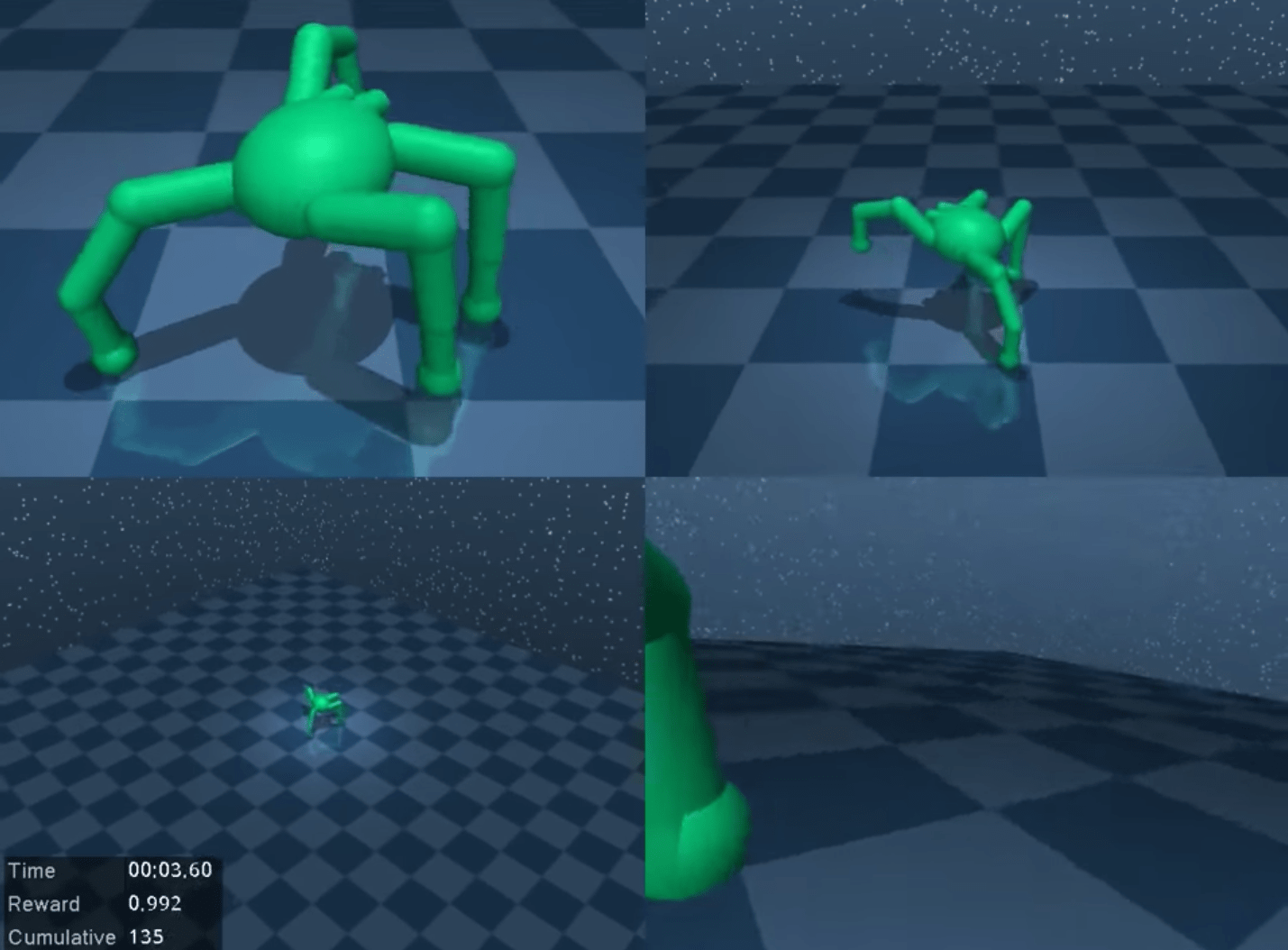
- Среды из Control Suite, включая среды с четвероногим роботом и собакой;
- Ряд задач на передвижение, включая футбол;
- Одну задачу на управление роботизированной рукой
PyMJCF
Библиотека PyMJCF создает иерархию Python объектов, которая один в один соответствует MuJoCo модели. Модели могут быть прикреплены друг к другу с помощью метода attach().
Сборщик
Сборщик является аналогом игрового движка, который определяет порядок, в котором вызываются функции и абстракции, описывающие награду, окончание и наблюдения.