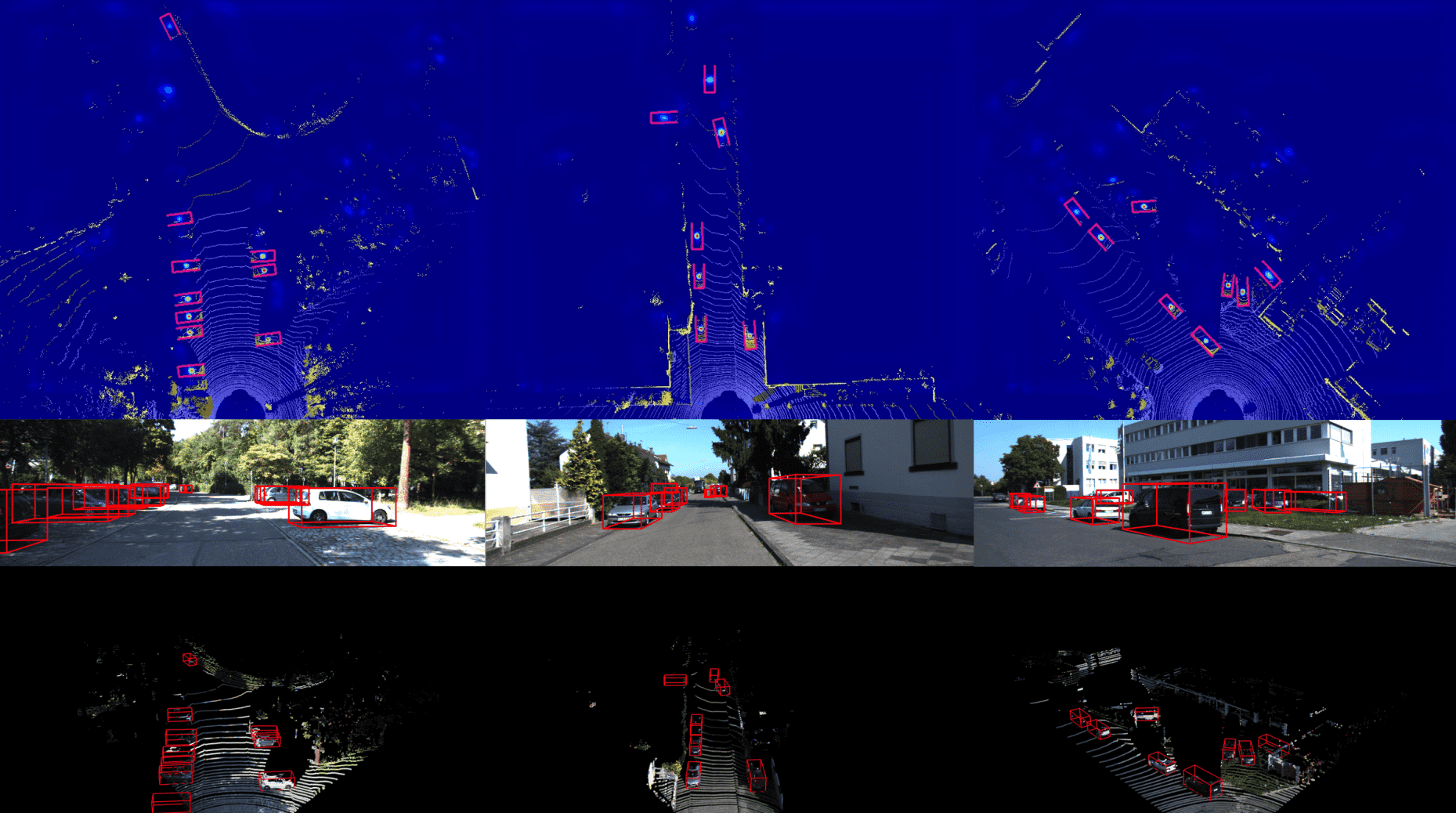
Распознавание объектов в 3D облаке точек на встраиваемых системах активно применяется в робототехнике, включая автономное вождение. Большинство прошлых работ пытаются решить задачу с помощью anchor-based методов распознавания объектов. Однако такие методы имеют два ограничения:
- Постобработка предсказаний является комплексной и вычислительно дорогой;
- Сложности с настройкой параметров anchor
Исследователи обходят эти ограничения с помощью anchor-free нейросети. AFDet — это одноэтапная нейросетевая модель для распознавания объектов в 3D облаке точек. Вся AFDet может быть обучена на GPU с упрощенным процессов постпроцессинга. На датасетах KITTI и Waymo модель выдает сравнимые с anchor-based подходами результаты.
Что внутри модели
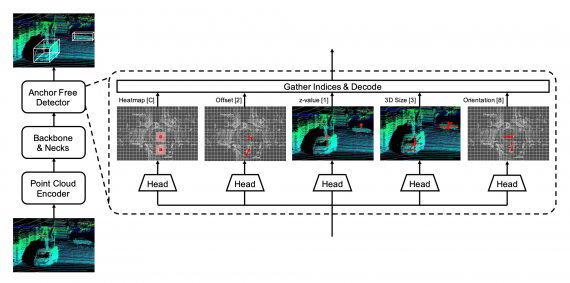
Фреймворк обучения AFDet состоит из энкодера облака точек, базовой сети и anchor-free детектора. В качестве кодировщика облака точек используется PointPillars.

Оценка работы модели
Исследователи сравнивали вариации предложенного anchor-free подхода с существующей моделью PointPillars. При этом PointPillars не является anchor-free. Ниже видно, что AFDet с полумиллионом параметров выдает сравнимые с PointPillars результаты.

