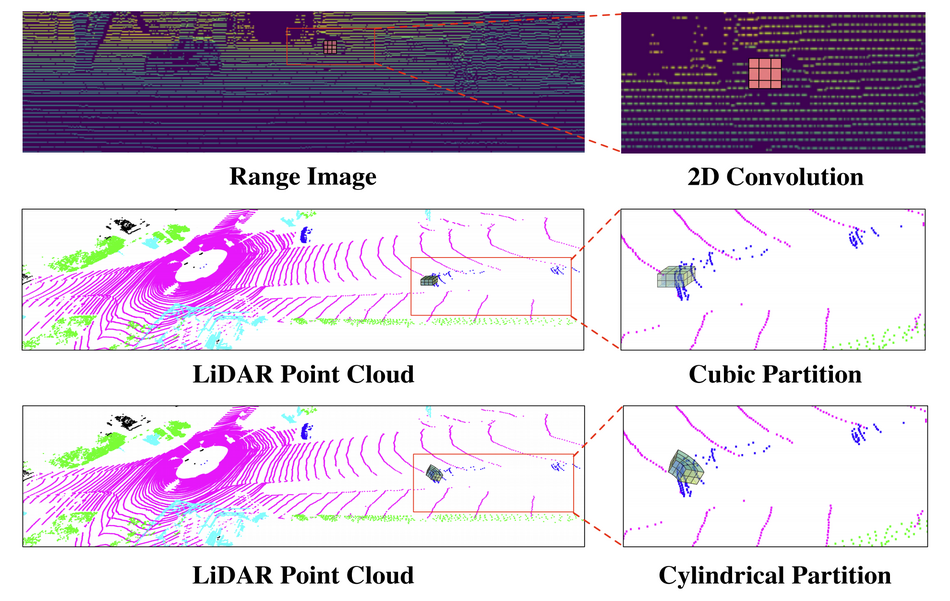
Исследователи предложили новый метод представления 3D облаков точек с LiDAR наряду с новым фреймворком для сегментации 3D облаков точек. Кроме традиционной вокселизации, исследователи предлагают использовать цилиндрические партиции, которые позволяют получать более равномерное распределение точек по клеткам партиций. Они разработали архитектуру, которая использует представления для извлечения высокоуровневых признаков о 3D структуре сцены.
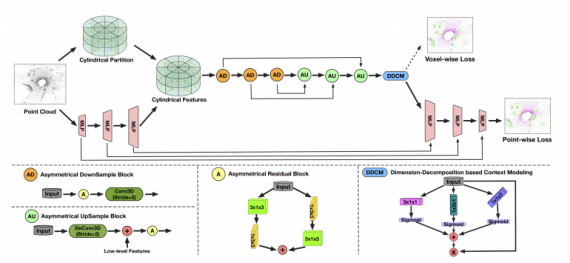
Предложенный фреймворк состоит из двух частей:
- Обучение на основе вокселей, которое использует цилиндрическое представление данных. На этом этапе используется encoder-decoder архитектура;
- Высокоуровневая детализация, которая извлекает признаки из облака слов. На этом этапе используется MLP
Исследователи проводили эксперименты на датасетах nuScenes и SemanticKITTI. Количественные результаты показывают, что метод обходит существующих модели на датасете SemanticKITTI с mIoU метрикой в 63.5.
Более подробно метод и процесс обучения описаны в оригинальной статье. Исследователи опубликовали код для воспроизведения экспериментов.
