Исследователи обучили нейросеть восстанавливать изображение от перекрывающих объектов: стекло окна, ограда и капли дождя. Модель принимает на вход видеозапись сцены, которую снимали на движущуюся камеру. На выходе модель генерирует изображение сцены без препятствия. В качестве архитектуры сети использовали глубокую сверточную нейросеть.
Что внутри модели
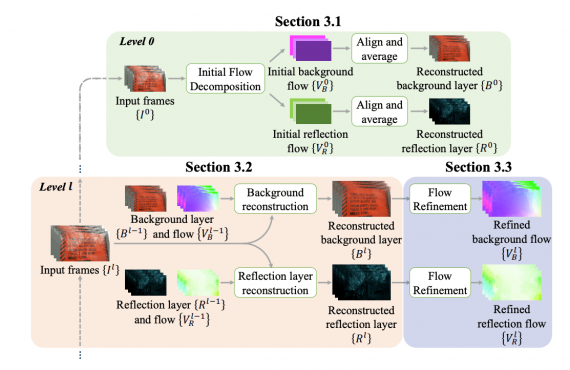
На вход модели поступает последовательность из кадров. Задача нейросети — разделить каждый кадр на два слоя: чистый задний фон и перекрывающий передний фон. Перекрывающим передним фоном могут быть ограда, капли дождя или окклюзия.
Чтобы отделять слои, исследователи используют подход от грубого до точного (coarse-to-fine). На первом этапе модель выдает грубую оценку заднего и переднего фонов. Чтобы уточнить предсказание, исследователи используют PWC-Net архитектуру. Фреймворк прогрессивно реконструирует задний фон и перекрывающий передний фон, пока не достигнет максимальной точности.
Оценка работы модели
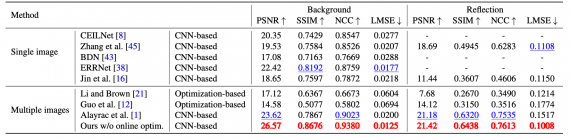
Исследователи сравнили предложенный подход с state-of-the-art методами. В качестве датасета использовали синтетический набор данных, который состоит из 100 последовательностей. Каждая последовательность состоит из 5 кадров. Ниже видно, что предложенный подход выдает сравнимые с state-of-the-art результаты.