The ‘Vegebot’ – a vegetable-picking robot that uses machine learning to harvest lettuce was developed by researchers from the University of Cambridge. The new robot shows that machine learning can be successfully applied to agriculture, a field which always embraces new technological advances.
The robot was trained to identify and harvest a special type of lettuce, in a completely autonomous way. The task of harvesting is an easy one for humans but extremely challenging for robots. For this reason, researchers decided to develop a robot that will do the harvesting mechanically.
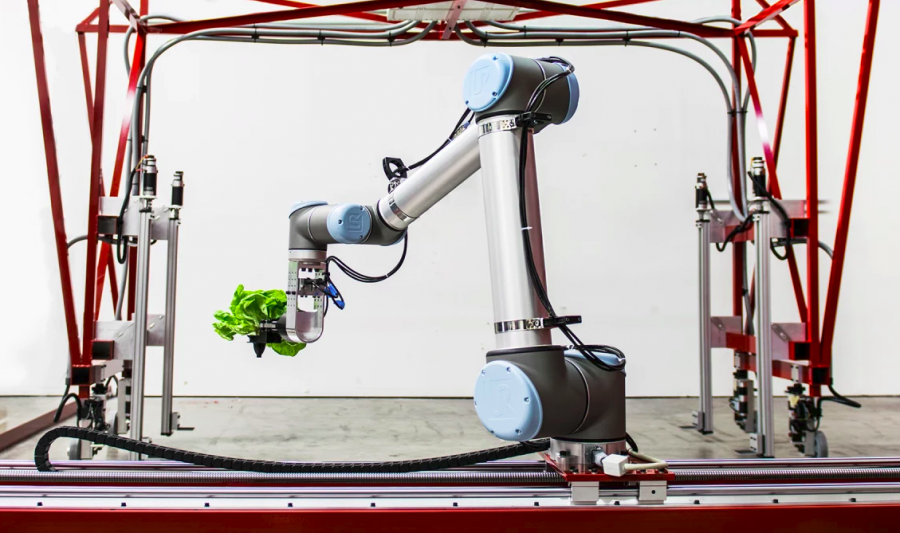
The prototype of the robot has two main components: a computer vision system, that identifies leaves that are ready for harvesting and a cutting system that should perform the harvesting in an efficient manner. The first component, the computer vision system, uses machine learning models that were trained on sample images of iceberg lettuce. In this way, the robot is able to perform recognition of healthy lettuces in a wide variety of settings (weather conditions, under occlusions, etc.). In order to perform this complex task, the robot uses two cameras: an overhead camera which detects lettuces in the image of the lettuce field and a second camera near the cutting blade which is used to perform a smooth cut.
Researchers working on Vegebot, mention that they wanted to develop a more generic approach, which can be used for other types of crops in the future. This kind of harvesters will bring numerous benefits in agriculture, ranging from crop efficiency to solving problems such as labor shortage and harvesting time. More about Vegebot can be read in the press release of the University of Cambridge.


