Google AI neural network simulates camera movement
3 March 2021
Google AI neural network simulates camera movement
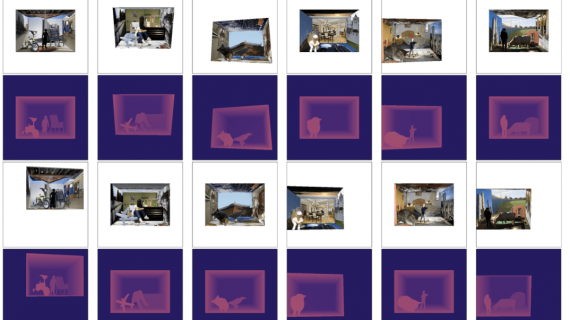
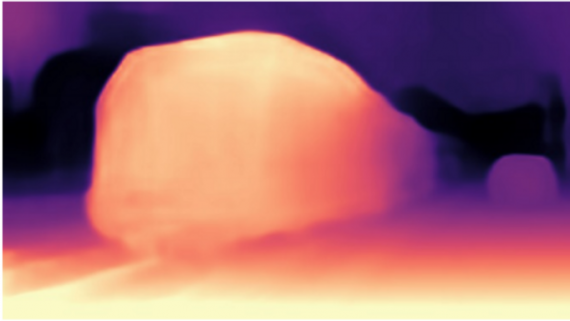
Google AI neural network simulates camera movement and parallax for photos. The Cinematic photos system is used in the Google Photos app. Image Depth Estimation Along with the latest photography…