Torch-Points3D — это опенсорсный модульный фреймворк для обучения нейросетевых моделей на 3D облаках точек. Библиотека призвана облегчить процесс обработки данных и построение пайплайнов для обучения моделей.
Подробнее про библиотеку
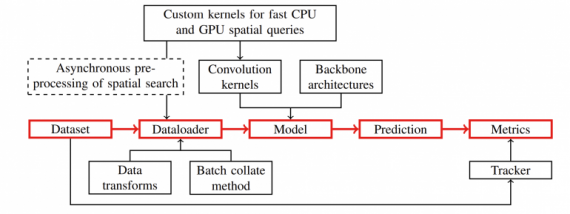
Фреймворк предоставляет стандартизированный интерфейс для обучения нейросетей, адаптированными под работу с данными облаков точек. Простота интерфейса снижает порог входа для проведения экспериментов на данных такого формата и делает процесс дизайна экспериментов быстрее.
Согласно разработчикам, фреймворк отличается от существующих аналогов для обработки данных 3D облаков точек: Pytorch3D, Kaolin и Det3D. Torch-Points3D объединяет разные задачи, нейросетевые архитектуры и датасеты, поэтому является более гибким для исследовательских задач. Библиотека основана на фреймворке для глубокого обучения Pytorch и на библиотеке для обработки 3D данных pytorch-geometric.
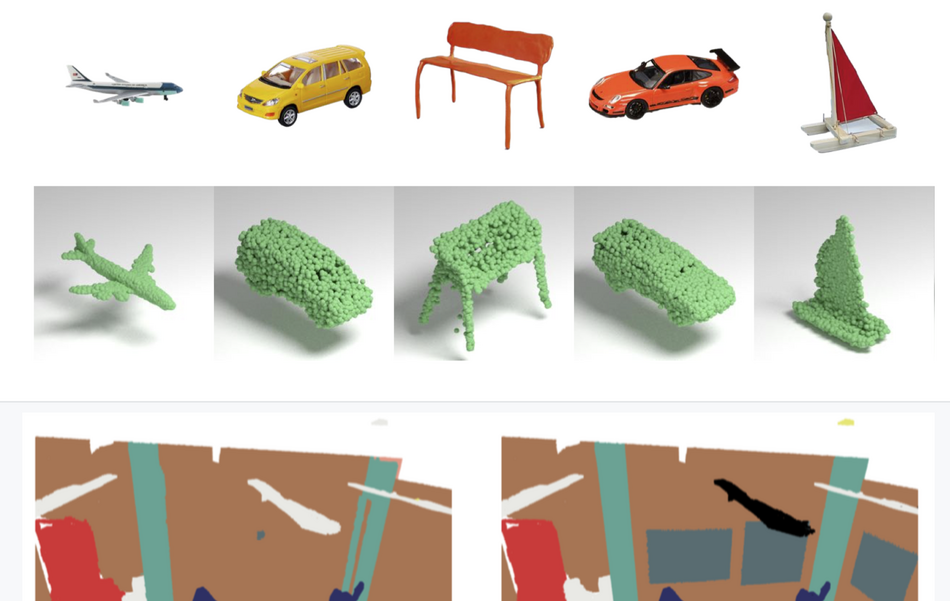
Torch-Points3D имеет функционал для решения таких задач, как классификация, сегментация, распознавание объектов, регистрация облаков точек, заполнение и другие. Доступные архитектуры нейросетевых моделей включают в себя PointNet, PointNet++, PointCNN, RSConv, VoteNet и PPNet. Среди доступных датасетов — Scannet, S3DIS, Shapenet, SemanticKitty, 3DMatch, ModelNet и Kitty Odometry.
Детали про архитектуру библиотеки, интерфейс и примеры использования доступны в открытом репозитории на GitHub.
