Torch-Points3D — это опенсорсный модульный фреймворк для глубокого обучения на данных облаков слов. Фреймворк упрощает процесс обучения моделей для 3D данных. Библиотека содержит оптимизированные по скорости реализации state-of-the-art архитектур и интерфейс для их обучения. Это снижает барьер входа, необходимый для прототипирования и написания пайплайна обучения.
Подробнее про библиотеку
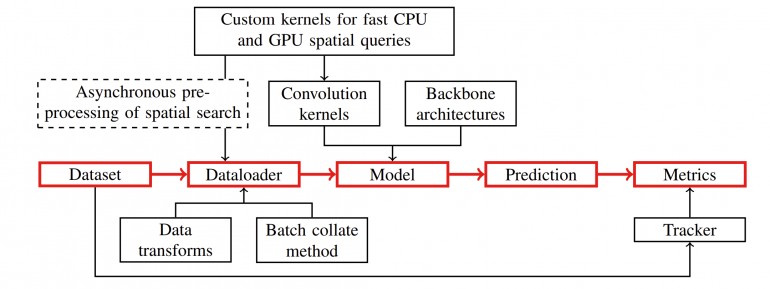
Предложенный фреймворк отличается от существующих Pytorch3D, Kaolin и Det3D тем, что объединяет в себе набор разных задач, моделей и датасетов для проведения воспроизводимых исследований. Torch-Points3D написан на PyTorch. Разработчики написали библиотеку с нуля поверх функционала из pytorch-geometric для манипуляции 3D данными.
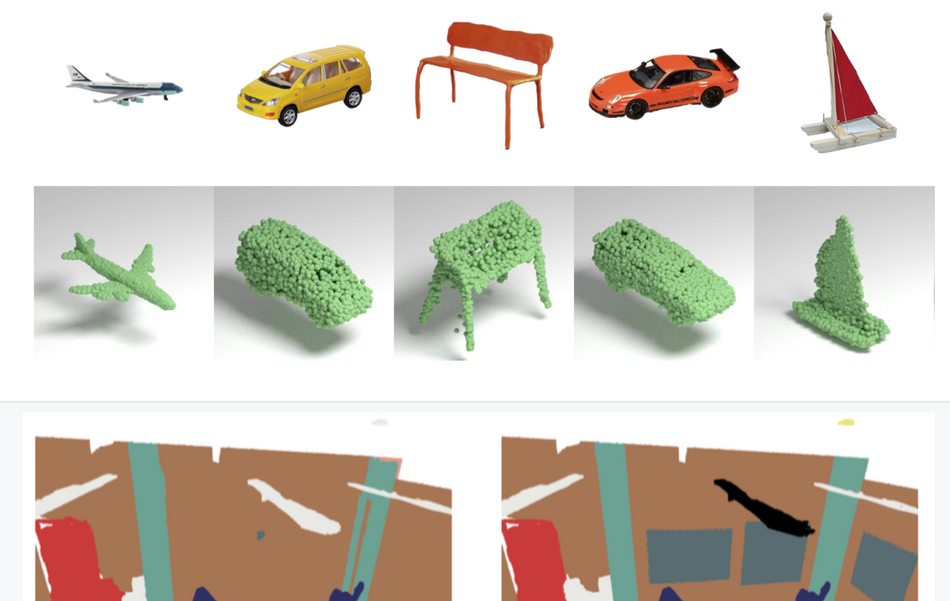
С помощью Torch-Points3D можно решить такие задачи, как классификация, сегментация, распознавание объектов, регистрация и заполнение облаков точек. Доступные архитектуры моделей включают в себя PointNet, PointNet++, PointCNN, RSConv, VoteNet, PPNet и другие.
Кроме того, в Torch-Points3D доступны следующие датасеты: Scannet, S3DIS, Shapenet, SemanticKitty, 3DMatch, ModelNet и Kitty Odometry.
Детали по структуре библиотеки и функционалу доступны в оригинальной статье и в открытом репозитории.
