Является ли Imagetotext.io надежным инструментом оптического распознавания текста?

Является ли Imagetotext.io надежным инструментом оптического распознавания текста?
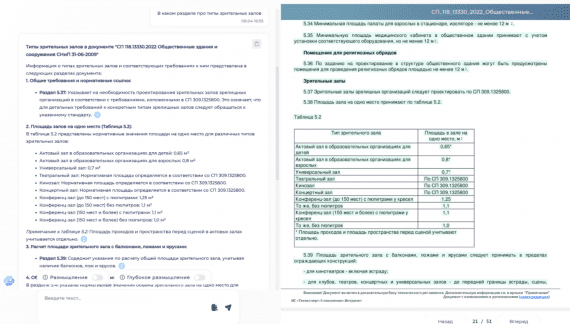
Часто возникает необходимость использовать текст с изображений. Но он заблокирован внутри них, и его нельзя скопировать. Либо приходится всё вводить вручную, либо использовать инструмент оптического распознавания символов (OCR). Эти инструменты…