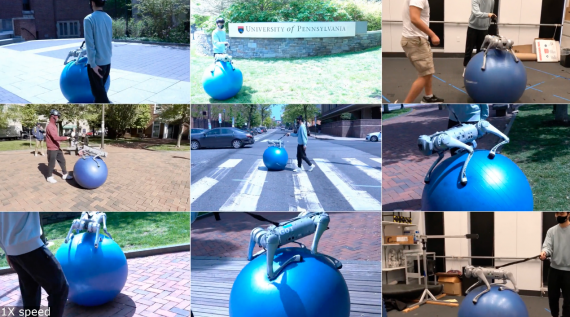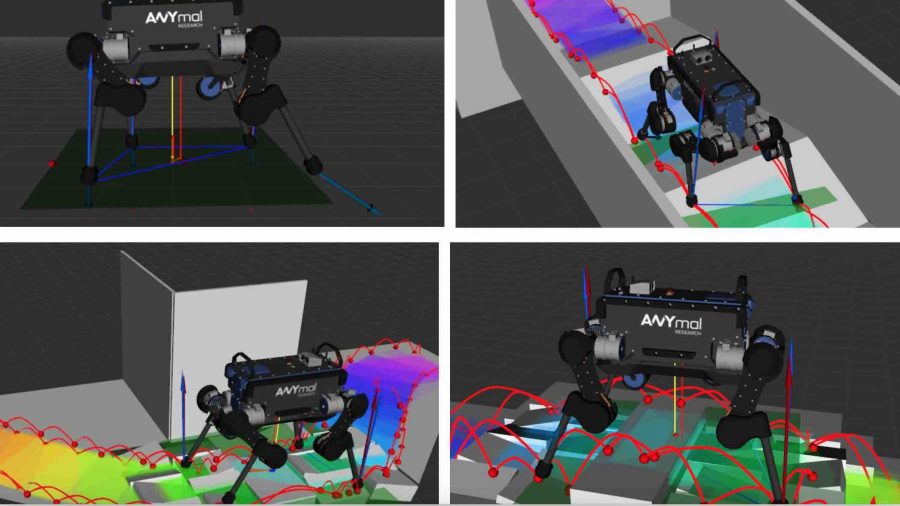
Исследователи из Оксфорда представили алгоритм поиска точки опоры для четвероногих роботов

Просмотров: 3135
Подписаться
0 Comments