В Норвегии разрабатывают роботизированную скоординированную систему Ocean-Air для проведения полностью автономных наблюдений за океаном. Разработки должны существенно сократить расходы на климатические исследования и повысить точность мониторинга.
Что исследуют в океане
Морские и прибрежные экосистемы изменяются из-за выбросов парниковых газов, загрязнения воды мусором и отходами предприятий, чрезмерного вылова рыбы и изменений климата. Наблюдение за океаном имеет большое значение для контроля климатических изменений, сохранения и восстановления экосистем.
Для сбора данных в океане используются корабли и подводные лодки, создаются специальные станции для мониторинга. Они могут управляться человеком или быть полностью автономными. Проблема в том, что большинство существующих автономных систем по-прежнему требуют участия большого количества людей на этапах развертывания, поэтому подобные исследования очень затратны.
Подводный планер
В рамках проекта предлагается разработать методы, которые позволят сократить стоимость систем мониторинга океана. Ученые уже создали прототип подводного микро-планера (Micro Underwater Gliders, MUG) для сбора данных, который может работать автономно при поддержке беспилотных летательных аппаратов и беспилотных кораблей.
Подводные планеры нужны, чтобы следить за изменениями солености воды, собирать данные о загрязнениях, наблюдать за течениями, измерять радиоактивный фон. Одной из целей работы была создание планера небольшого размера, чтобы его можно легко транспортировать с помощью дронов.
Микроконтроллер Arduino и Li-ion аккумуляторы
Среди компонентов — небольшой поршень, который приводится в движение бесщеточным двигателем постоянного тока. Поршень заключен в заполненный маслом гибкий корпус. Шесть последовательно соединенных литий-ионных аккумуляторов емкостью 3500мАч дают напряжение 25,2В. Планер управляется Moteino MEGA — микроконтроллером на базе Arduino, работающим на частоте 433 МГц.
Оснащение
Планер оснащен датчиком давления, миниатюрным зондом для измерения солености и других показателей, и прибором для измерения флуорисценции — флуорометром. Флуорометр предназначен для анализа большого количества биологических и химических параметров в том числе определения концентрации углеводорода, пигментов водорослей и кислорода. GPS-приемник фиксирует данные о местоположении на поверхности. Однако точность определения местоположения под водой ограничена, поэтому для навигации и передачи команд используется акустический модем.
Глубина погружения
Прототип микро-планера сможет работать на глубине 200 м, однако в дальнейших разработках глубина будет увеличиваться.

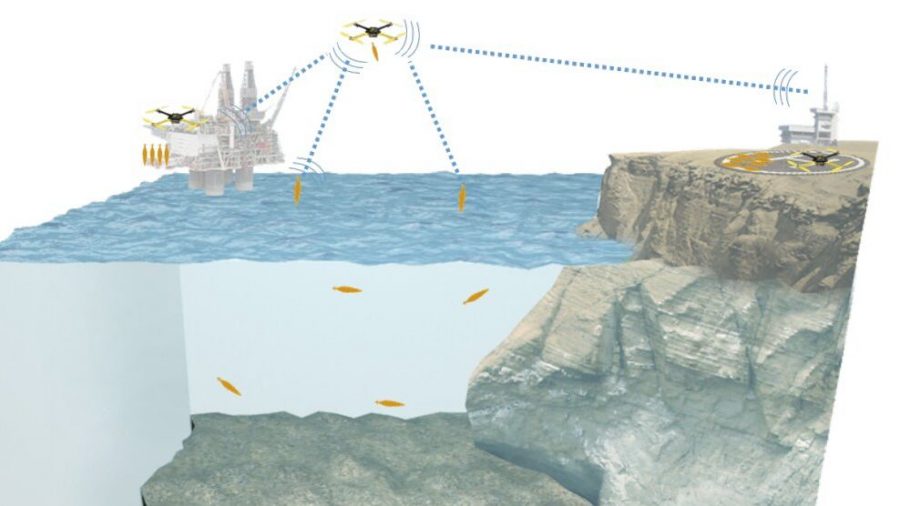
Ученые предлагают два сценария работы беспилотных аппаратов:
- В первом микро-планеры возвращаются на базовые станции на суше или на уже существующие морские платформы с помощью беспилотных летательных аппаратов. Этот сценарий подходит для мониторинга побережья и непрерывного экологического мониторинга вокруг нефтяных и газовых платформ.
- Во втором сценарии базой для MUG и беспилотных летательных аппаратов служит беспилотный корабль с высоким уровнем автономной работы. Микро-планеры возвращаются на корабль для подзарядки и передачи данных. Система работы сводит вмешательство человека к минимуму, делая доступными операции по наблюдению и сбору данных в труднодоступных местах — десятки микро-планеров соберут гораздо больше данных в толще воды, чем беспилотный корабль.

Проект разрабатывается совместно институтами OsloMet, NTNU, Норвежским полярным институтом и TriOS и финансируется Исследовательским советом Норвегии (RCN), Федеральным министерством экономики и энергетики Германии (BMWi) и Европейской комиссией в рамках фонда ERA-NET Cofund MarTERA.
Предложенные системы наблюдений будут продемонстрированы во время морских испытаний в фьорде Тронхейм и на леднике в Шпицбергене, Норвегия.



