RealRestorer: открытая модель улучшения качества фото обогнала Nano Banana Pro на бенчмарке с реальными снимками
30 марта 2026
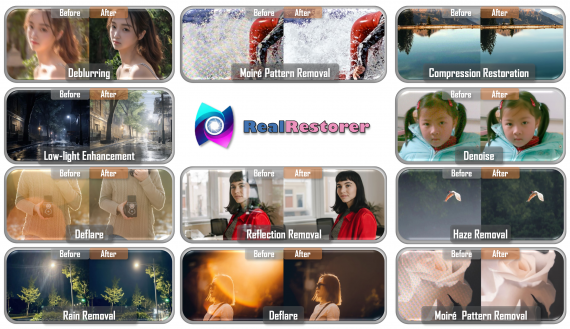
RealRestorer: открытая модель улучшения качества фото обогнала Nano Banana Pro на бенчмарке с реальными снимками
Команда исследователей из StepFun, Southern University of Science and Technology и Китайской академии наук опубликовала RealRestorer — открытую модель улучшения качества фотографий, которая умеет убирать размытость, шум, дождь, засветку от…