DreamX-World 1.0: открытая модель генерации мира с контролем камеры, текстовым управлением и запоминанием локаций
17 июня 2026
DreamX-World 1.0: открытая модель генерации мира с контролем камеры, текстовым управлением и запоминанием локаций
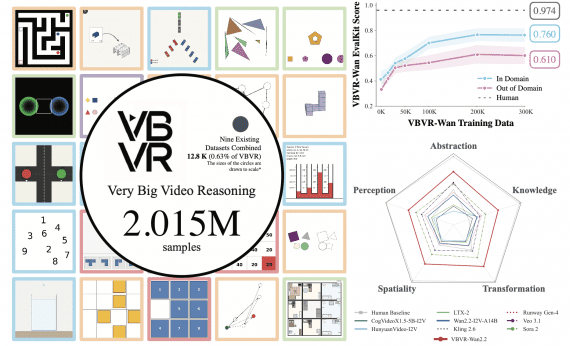
Команда AMAP-ML опубликовала DreamX-World 1.0 — интерактивную генеративную модель мира, которая превращает текст или изображение в управляемое видео с точным контролем камеры, памятью о ранее посещённых сценах и поддержкой событий…