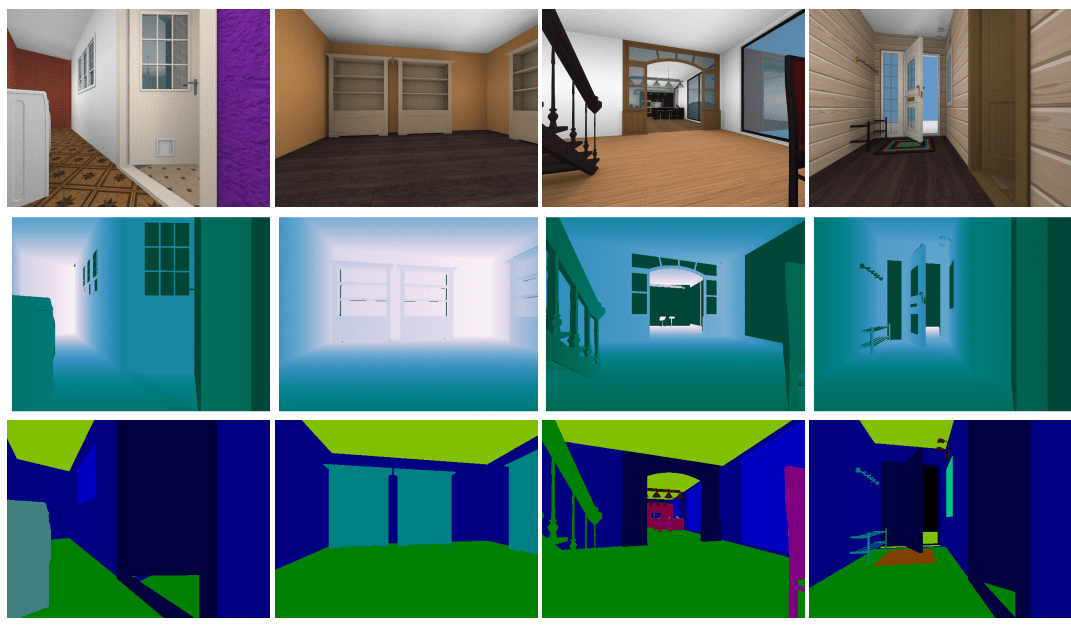
DISCOMAN — это датасет с сгенерированными изображениями интерьера в высоком разрешении. Датасет содержит 200 разных траекторий передвижений на одной локации. Каждая траектория содержит от 3 до 5 тысяч кадров. Каждое изображение имеет 2D карту, семантическую разметку и оценку глубины объектов на изображении. Траектории были сгенерированы так, чтобы симулировать движения домашнего робота. Датасет собирали исследователи из Samsung AI Research.
Что такое SLAM и зачем ее решать
Одновременная локализация и разметка (SLAM) — это важный компонент в робототехнике. Задача делится на следующие подзадачи:
- Оценка траектории;
- Картография местности;
- Семантическая сегментация места
Большинство существующих датасетов и стандартных задач направлены на решение отдельной подзадачи. Датасеты для картографирования (например, Intel Lab Data) маленькие и недостаточно разнообразные. Оценка SLAM методов требует информации о положении камеры. Однако в случае с использованием реальной локации это потребует дополнительного оборудования. По этой причини стандартные датасеты для SLAM обычно содержат короткие траектории или однообразную локацию (например, одну комнату).
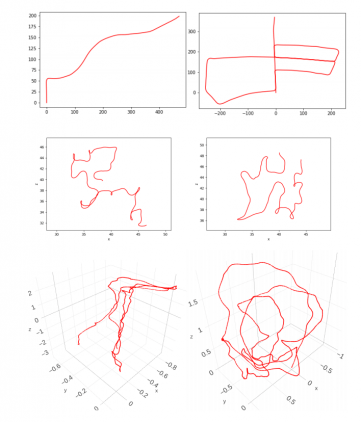
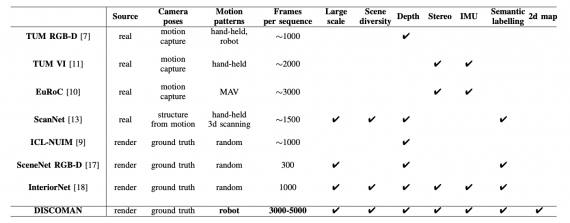
Вид локации был сгенерирован с использованием реалистичных планировок домов. Существующие похожие датасеты фокусируются на одной части задачи SLAM. DISCOMAN является наиболее полным датасетом для тестирования SLAM методов. Траектории в DISCOMAN более сложные, чем в KITTI. При этом они менее сложные в сравнении с датасетом TUM RGB-D. Данные разделены на обучающую, валидационную и тестовую выборки с различными видами виртуальных домов. Исследователи сравнили на датасете стандартные geometry-based SLAM алгоритмы и новые learning-based алгоритмы. Помимо этого, были протестированы алгоритмы для семантической и паноптической сегментаций.