Microsoft DragNUWA: Video Generation via Object Trajectories
15 January 2024
Microsoft DragNUWA: Video Generation via Object Trajectories
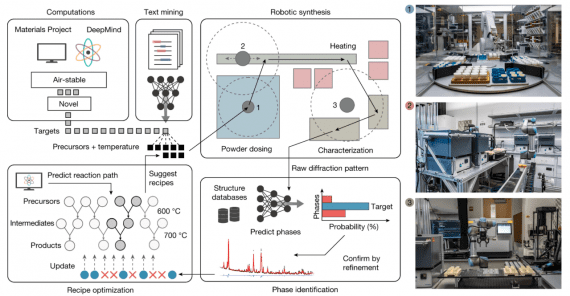
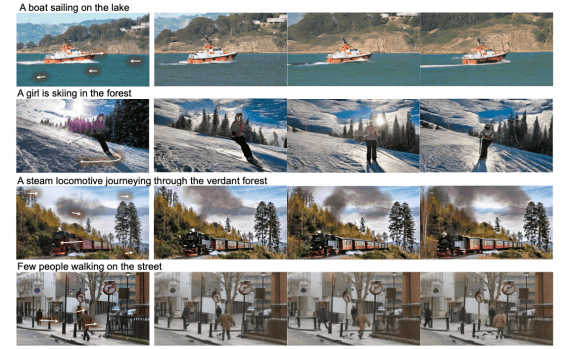
Microsoft has released the DragNUWA weights – a cross-domain video generation model that offers more precise control over the resulting output compared to similar models. Control is achieved by simultaneously…