NVIDIA представила обновления своей экосистемы Isaac для разработки роботов на выставке COMPUTEX 2025, которые улучшают возможности генерации синтетических данных и совершенствуют тестирование моделей на всех этапах разработки.
Isaac Sim 5.0: открытая эра в симуляции роботов
Новая версия Isaac Sim 5.0 от NVIDIA на базе NVIDIA Omniverse и OpenUSD будет полностью открытой и настраиваемой, что открывает доступ к генерация синтетических данных и тестированию для всех разработчиков.
Особенности предстоящего релиза Isaac Sim 5.0:
- Отрытый исходный код: Isaac Sim 5.0 будет доступен на GitHub, что сделает симуляцию сред для обучения роботов доступной для как для индивидуальных, так и для корпоративных разработчиков.
- Интеграция с NVIDIA Brev. Этот сервис помогает ИИ-разработчикам найти среди предложений облачных провайдеров наиболее подходящий по соотношению цены и качества, создавая высококонкурентный рынок. Развертывание на облачных GPU Nvidia ускорит циклы итераций благодаря развертыванию в один клик.
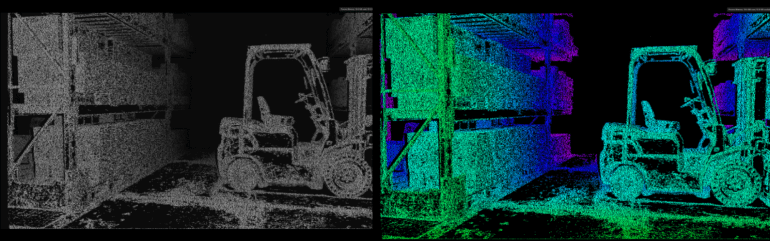
- Продвинутая физика сенсоров. Улучшенная симуляция датчиков глубины с реалистичным моделированием шума для стереокамер, создающая изображения глубины с шумовыми характеристиками, аналогичными данным с реальных сенсоров.
- Улучшенные модели исполнительных механизмов: Новые модели трения в суставах, определенные через схемы OpenUSD, разработанные в сотрудничестве с Hexagon Robotics и maxon, обеспечивают более точную симуляцию поведения роботов в реальном мире
Генерация реалистичных синтетических данных
Генерация синтетических данных имеет решающее значение для обучения адаптивных роботов, способных безопасно работать в реальных условиях. Нештатные ситуации, вроде пожаров на складе, удобнее отрабатывать в симуляторах. Isaac Sim 5.0 представляет несколько расширений для продвинутой генерации синтетических данных:
- MobilityGen: открытое расширение для генерации физически достовернных данных для обучения роботов передвижению в сложных средах.
- Симуляция персонажей и объектов: новые расширения, включая Isaacsim.Replicator.Agent для симуляции человеческих и роботизированных персонажей, и Isaacsim.Replicator.Object для генерации синтетических наборов данных для обнаружения объектов.
- Расширение для инцидентов создает данные на основе инцидентов, таких как пожары, разливы или падающие объекты, для обучения реагированию в чрезвычайных ситуациях. В реальности такие ситуации моделировать затратно.
- Расширение для подписей создает пары изображение-подпись для обучения моделей понимать сцены и считывать тестовую информацию.
Isaac Lab 2.2: улучшенная среда для обучения роботов
Isaac Lab 2.2 фокусируется на улучшении оценки и обучения политик управления роботами, в первую очередь для гуманоидных роботов. Ключевые обновления:
Тестирование GR00T N1
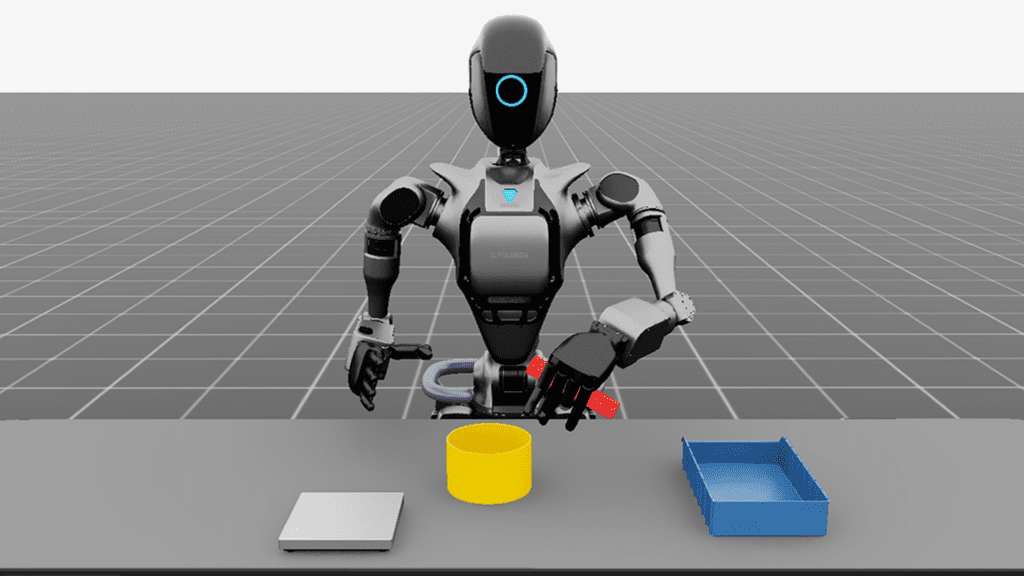
NVIDIA разработала набор программ, которые автоматически тестируют, насколько хорошо их модели ИИ (GR00T N1) справляются с реальными задачами. Эти тесты проходят в виртуальных средах, имитирующих настоящие производственные условия, где роботу нужно выполнять конкретные промышленные операции — например, отделять гайки от трубок и раскладывать их по разным контейнерам. Разработчики могут использовать эти готовые сценарии, чтобы быстро проверить, как их роботы будут действовать в реальном мире, не тратя время на создание тестовых сред с нуля.
Тензоризованные присоски
Продвинутая симуляция поверхностных захватов, поддерживающая деформируемые присоски с возможностью измерения сил захвата и обновления параметров в тензоризованном формате.
Стандартизированные интерфейсы для оптимизации рабочих процессов
Для упрощения интеграции между различными платформами NVIDIA представила ключевые улучшения связи:
- Стандартизированные интерфейсы ROS 2: Разработанные в сотрудничестве с Robotec.ai, Gazebo, Open 3D Engine и NVIDIA, эти интерфейсы обеспечивают единый метод управления различными симуляторами через ROS 2.
- Мост ZMQ: Расширение, добавленное в Isaac Sim 4.5, обеспечивающее быструю двунаправленную связь с внешними приложениями за пределами ROS, поддерживающее тестирование программного обеспечения с потенциалом для аппаратного тестирования на периферийных устройствах.
Отраслевое внедрение
Технологии робототехники NVIDIA адаптируются ведущими игроками в отрасли. Agility Robotics, Boston Dynamics, Fourier, Mentee Robotics, Neura Robotics и XPENG Robotics используют NVIDIA Isaac Sim и Isaac Lab для симуляции и валидации своих гуманоидных роботов. Skild AI использует среды симуляции для разработки общего интеллекта роботов, в то время как General Robotics интегрирует их в свою платформу симуляции роботов.
Ведущие тайваньские производители электроники и робототехники, включая Adata, Advantech, Delta Electronics, Foxconn, Foxlink, Solomon, Techman и Wistron, используют NVIDIA Isaac Sim и Lab для разработки роботов следующего поколения на базе ИИ.
Единая архитектура для полной разработки роботов
Isaac Sim и Isaac Lab будут полностью совместимы с рабочими станциями и серверами NVIDIA RTX PRO 6000, предлагая единую архитектуру для всех стадий разработки роботов: обучение, генерацию синтетических данных, обучение роботов и симуляцию. Это дает возможность беспрепятственно переходить от симуляции к физическому развертыванию.
NVIDIA Isaac Sim 5.0 и Isaac Lab 2.2 будут доступны до конца второго квартала 2025 года.
Перспективы на будущее
Эти достижения в совокупности представляют собой значительный шаг к сокращению разрыва между симуляцией и реальностью в разработке роботов. Достоверность симулируемых сред, расширяя возможности генерации синтетических данных и совершенствуя оценку фундаментальных моделей, NVIDIA позволяет разработчикам создавать более способных роботов, которые могут безопасно и эффективно работать в сложных реальных условиях.
Интеграция мировых фундаментальных моделей с платформами симуляции роботов дополнительно демонстрирует приверженность NVIDIA созданию комплексной экосистемы для робототехники на базе ИИ, от генерации данных и обучения моделей до развертывания на физическом оборудовании.