Инженеры MIT решили задачу облета дронами препятствий на высоких скоростях. Алгоритм позволяет быстро выполнять с помощью дронов такие операции, как поиск и спасение людей после стихийного бедствия.
Обучение дронов медленному облету препятствий является несложной задачей в силу того, что при низких скоростях сопротивление воздуха незначительно и его можно исключить из рассмотрения при моделировании полетов дрона. Однако на высоких скоростях аэродинамика дронов становится слишком нестабильной и сложной для прогнозирования, что часто приводит к авариям.
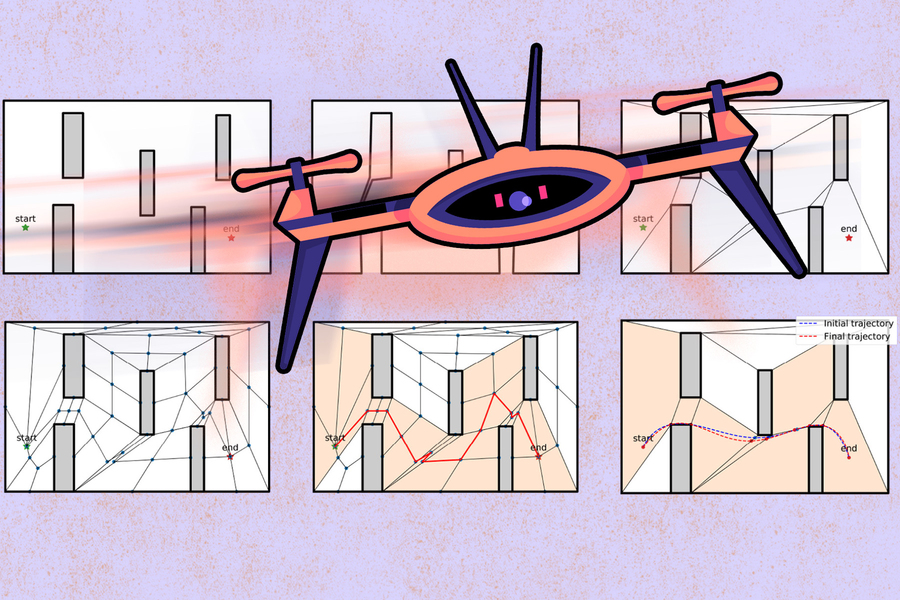
В алгоритме инженеров MIT используется высокоточная байесовская оптимизация на основе аналитических аппроксимаций, моделирования полетов дронов через виртуальную полосу препятствий и реальных экспериментов с дронами, летевшими по тому же маршруту в физическом пространстве. Исследователи показали, что дрон, обученный на их алгоритме, пролетал через полосу препятствий на 20% быстрее, чем дрон, обученный с использование обычных алгоритмов планирования полета.

Интересно, что новый алгоритм не приводил к тому, что обученный дрон всегда летел быстрее обычного дрона. В некоторых случаях он замедлялся, чтобы пройти сложный участок траектории или сэкономить энергию для последующего ускорения и обгона обычного дрона.