Skip to content
Neurohive — Нейронные сети
Search toggle
Поиск:
Primary Menu
Close Primary Menu
Новости
Туториалы
Датасеты
State-of-the-art
Основы
Контакты
Туториал по созданию системы фильтров Snapchat с использованием Deep Learning
9 мая 2019
Туториалы
Tagged in:
Компьютерное зрение
Просмотров: 6566
Автор:
Никита Арзамазов
Источник:
https://towardsdatascience.com/implementing-snapchat-like-filters-using-deep-learning-13551940b174
Github:
https://github.com/agrawal-rohit/Santa-filter-facial-keypoint-regression
Еще почитать
Следующая:
Туториал: добавление тегов фотографиям с генератором Tagbox для удобства поиска на MacOS
Предыдущая:
Туториал по использованию AutoML в H2O.ai для автоматизации подбора гиперпараметров модели
Подписаться
Уведомить о
новых последующих комментариях
новых ответах на мои комментарии
Label
{}
[+]
Name*
Email*
Δ
Label
{}
[+]
Name*
Email*
Δ
0
Comments
Старые
Новые
Популярные
Читайте также
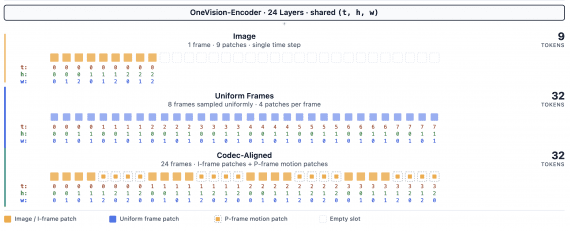
LLaVA-OneVision-2-8B: мультимодальная модель анализирует сжатый видеопоток через кодек вместо нарезки кадров
AI-модели на 13% хуже людей распознают сгенерированные ASMR-видео
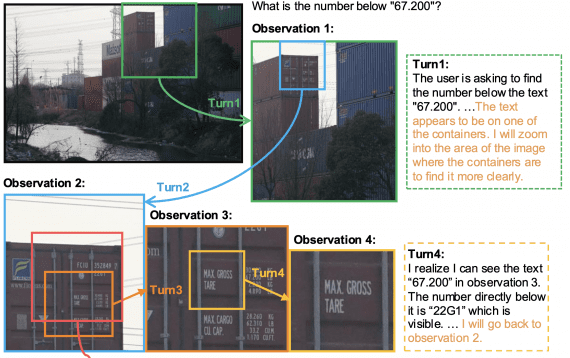
Mini-o3: открытая мультимодальная 7B-модель превзошла GPT-4o в визуальном поиске благодаря 30-шаговым цепочкам рассуждений
wpDiscuz
Insert