Researchers from the Department of Mechanical, Electronics and Chemical Engineering at Oslo Metropolitan University and the Norwegian Unversity of Science and Technology have published a paper introducing a prototype of an autonomous ocean observing system.
This work is a part of a bigger research project named OASYS, funded by the Research Council of Norway (RCN), the German Federal Ministry of Economic Affairs and Energy (BMWi) and the European Commission. The goal of this project is to develop and demonstrate a fully-autonomous, Ocean-Air robotic operation for ocean observation and exploration.
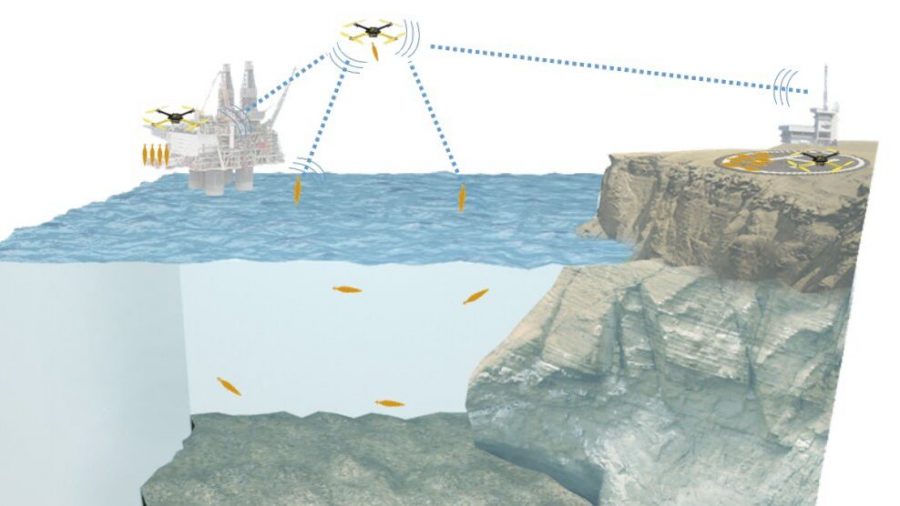
Within the project, the researchers led by Erik Sollesnes were able to design and develop a prototype of Ocean-Air collaborative robotic system. They developed a swarm of low-cost Miniature Underwater Gliders which operate with the support of Unmanned Aerial Vehicles (UAVs) as well as Unmanned Surface Vessels (USVs).
The idea behind the concept is to have a swarm of low-cost underwater gliders which will use UAVs and USVs as bases for deployment, recovery, battery charging, and communication.
In the paper, they present the whole concept together with its abilities and limitations. They built the prototype and tested it in a small aquarium, in relatively sterile settings. Also, researchers tested the electronic devices used in a pressure testing facility to ensure that such technology can be pressure-tolerant.
The theoretical background and the experiments have confirmed the viability of such a MUG concept. The prototype developed within this project can serve as a foundation for further improvement and building a real collaborative robotic system (of MUGs, UAVs, and USVs) that can be deployed in the oceans. The paper was published on arxiv, and more about the project OASYS can be read here.


