Беспилотные автомобили в ближайшие несколько лет перестанут быть научной фантастикой. В последние несколько месяцев мы стали свидетелями стремительного развития этой технологии. Waymo (ранее проект Google, сейчас является частью Alphabet) два месяца назад запустил свой первый коммерческий сервис с беспилотным такси и в 2021 году планирует открыть завод в штате Миган. Yandex прошлым летом начал тестировать такси без водителей. Volvo выпустила пресс-релиз о переходе на беспилотные грузовики для работы на шахте в Норвегии. Китайская компания DeepBlue Technologies начнет поставлять беспилотные автобусы в Европу уже в 2019 году.
Несмотря на это, мы с уверенностью можем утверждать, что беспилотных автомобилей пока не существует. Кто-то может возразить, что беспилотные автомобили уже являются реальностью, и дорогах можно встретить автомобили, способные ездить сами (например, автопилот от компании Tesla). Но так ли это на самом деле?
Что такое беспилотный автомобиль?

На текущий момент мы добились только частичной автоматизации вождения, но не полной автономности. Беспилотные автомобили сейчас могут передвигаться только в определенных условиях и требуют внимания со стороны человека.
Что такое беспилотный автомобиль? Означает ли это, что машина может ездить с небольшим вмешательством человека? Или это автомобиль, способный разумно ориентироваться? Или он передвигается вообще без помощи человека в любых ситуациях и при любых условиях? Можно дать много определений.
В теории:
Полностью автономная система должна быть способна: собирать информацию об окружающей среде, работать продолжительное время без человеческого вмешательства и накапливать знания для совершенствования методов выполнения своих задач или адаптации к изменяющимся условиях.
Лучшие на начало 2019 года представители беспилотных автомобилей довольно далеки от этого определения.
SAE, орган стандартизации автомобилей, опубликовал отчет, в котором формально определил 6 уровней автономности самоуправляемых автомобилей.
Уровни автономности беспилотных автомобилей

Уровень 0: Автоматизированная система выдает предупреждения и может мгновенно вмешаться, но не имеет постоянного контроля над автомобилем.
Уровень 1 (“с руками”): Водитель и автоматизированная система делят контроль над автомобилем. Например, адаптивный круиз контроль: водитель контролирует рулевое управление, а система — скорость; или помощник для парковки, когда рулевое управление контролируется системой, а контроль скорости осуществляется вручную. Водитель всегда должен быть готов взять управление в свои руки. Система предупреждения о сходе с полосы — еще один пример первого уровня автономности.
Уровень 2 (“без рук”): Автоматизированная система берет полный контроль над машиной (ускорение, торможение, рулевое управление). Водитель должен отслеживать движение и быть готов в любой момент немедленно вмешаться, если система откажется корректно работать. Сокращение “без рук” не следует понимать буквально. Контакт между рукой и рулём всё еще необходим, согласно классификации SAE 2, чтобы подтвердить готовность водителя немедленно вмешаться.
Уровень 3 (“не глядя”): Водитель может безопасно отвлечь свое внимание от задач вождения на посторонние вещи, например, он может набирать сообщение или смотреть фильм. Транспортное средство само справится с ситуациями, требующими немедленного действия, например экстренная остановка. Водитель всё ещё должен быть готов взять управление в свои руки за ограниченное время, указанное производителем. Например, в 2018 году Audi A8, люксовый седан, стал первым коммерческим автомобилем, достигшим 3 уровня автономности. Этот автомобиль имел так называемую функцию автопилота в пробке (Traffic Jam Pilot). После активации водителем этой функции, машина берет полный контроль над всеми аспектами движения в потоке с медленным движением со скоростью до 60 км/ч. Опция работает только на магистралях с физическими барьерами, разделяющими свой поток и встречный.
Уровень 4 (“не думая”): Водитель может спокойно лечь спать или покинуть водительское место. Самостоятельное движение автомобиля возможно только на ограниченных пространственных участках (геозонах) или в специальных условиях, таких как пробки. Автомобиль должен безопасно завершить поездку, например, припарковаться, если водитель не взял управление под свой контроль.
Уровень 5 (“управление по желанию”): Вмешательство со стороны человека не требуется вообще. Примером такого уровня развития технологий является роботизированное такси.
В следующей главе этой статьи я кратко объясню основные составляющие текущих самоуправляемых автомобилей и расскажу о современном состоянии развития и важности каждой из частей. Также будет сказано об основных игроках на этом рынке.
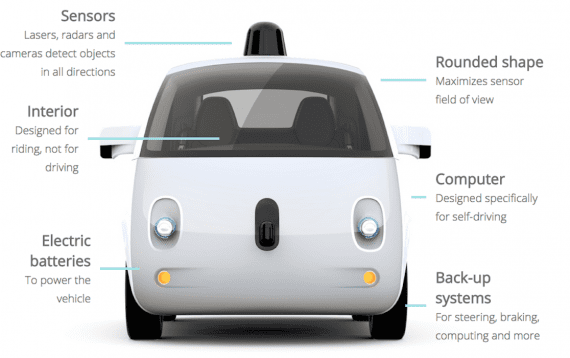
Оборудование беспилотного автомобиля
В разговорах об автономном вождении часто упоминают искусственный интеллект, алгоритмы и софт. Но железо играет ключевую роль в достижениях в области беспилотных авто, ровно как и другие компоненты, упомянутые выше.
Со стороны железа оборудование, необходимое для автономного вождения, включает сенсоры, технологии связи, силовые приводы, а также специальные платформы для беспилотного движения.
Сенсоры
Сенсоры снабжают машину всей необходимой информацией об окружающей среде и окружении. Способность выполнять автоматизированные задачи сильно зависит от возможности собрать достаточное количество корректных и релевантных данных о состоянии окружающей среды.
LIDAR
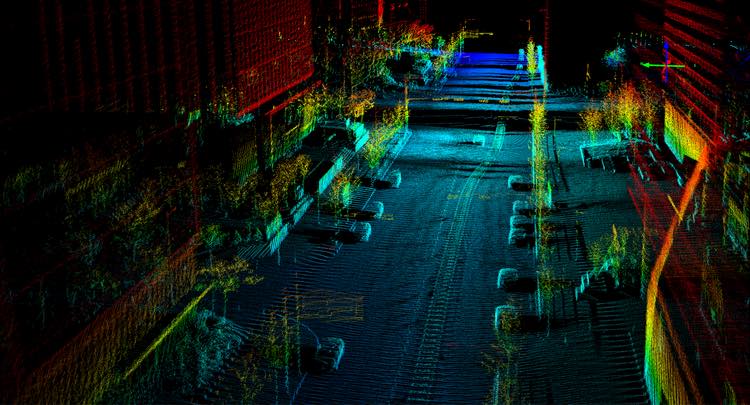
Сенсорам LIDAR пророчат блестящее будущее в системах беспилотных авто. С помощью них производится трехмерное сканирование окружающей среды, что дает намного больше информации, чем обычный сканер в камере. Камеры обеспечивают детали, но требуют специального программного обеспечения на основе машинного обучения для преобразования 2D изображения в 3D. LIDAR напротив предоставляет точные и удобные для компьютера данные в форме точных измерений.
Большая часть серьезных игроков в области беспилотных авто считают сенсоры LIDAR незаменимыми компонентами самоуправляемой машины. Однако из-за высокой стоимости этого сенсора (не беря в расчет сложности, возникающие при обработке больших объемов данных, 3D сканов с LIDAR в реальном времени) не ясно, будут ли в будущем датчики LIDAR частью системы автономного вождения 5 уровня.
Рынок LIDAR сенсоров стремительно растет на ожиданиях о будущем использовании в беспилотных автомобилях. Однако на данный момент цена является серьезной угрозой для рынка LIDAR.
Производители лидаров:
- Continental зашла на рынок LIDAR устройств после поглощения части бизнеса Hi-Res 3D Flash LIDAR компании Advanced Scientific Concepts в марте 2016 года. Теперь continental предлагает свои трехмерные лидары (без подвижных частей) и лидары (SRL-121).
- Velodyne предлагает датчик AlphaPuck LIDAR. Его цена составляет около $12 000, а сам он является первым 300м сенсором с 128 каналами (слоями). Кроме AlphaPuck (улучшенной специализированной версии VelodynePuck), Velodyne предлагает Veladome и Velarray. На старую версию AlphaPuck в прошлом году цена была снижена на 50%, что связано с модернизацией производственного процесса компанией. Самый мощный LIDAR сенсор — HDL-64E — имеет 64 слоя, 360 FOW и до 2,2 миллионов точек в секунду. Этот сенсор чрезвычайно дорогой — до $100 000 за экземпляр.
- LIDAR Scala от Valeo является первым коммерческим лазерным сканером, нашедшем применение в автомобильной отрасли. Scala — механический лидар, покрывающий 145 градусов. Valeo сотрудничает с Ibeo и Audi, чтобы сделать лидар Scala коммерчески доступным.
Рынок LIDAR устройств оказывается разделенным, борьба за первенство обещает быть интенсивной.
Камера

Когда дело доходит до датчиков камеры, то здесь стоит отметить цену. Камеры относительно дешевые, поэтому автономное средство передвижения может иметь их несколько, чтобы получать больше информации об окружающей среде. Можем увидеть, что для автоматизации вождения компании, такие как Tesla, полагаются на камеры и машинное зрение (Tesla избегает датчики LIDAR в своих продуктах). Когда на рынке мы имеем дело с камерами, мы видим, что они xчасто идут вместе с программным обеспечением (с использованием или без использования искусственного интеллекта) или встроены в специальные сенсоры. Стоит отметить, на текущий момент камеры являются основным компьютерным решением восприятия для продвинутых систем автономного вождения.
Ambrella — компания, которая работает над беспилотным авто на основе только камер. Прототип автомобиля от Ambrella оснащен дюжиной их стереокамер SuperCam3 с разрешением 4К, каждая из которых имеет угол обзора в 75 градусов.
Mobileye — еще одна компания, работающая с камерами и компьютерным зрением для автономного вождения. Их нано-камера идет в связке с программой для визуальных решений для поддержки продвинутых систем помощи водителю (ADAS).
Другие производители камер — DeepVision, Vaya Vision, Chronocam, Roadsense, Nvidia.
Радар
Радар — третий наиболее распространенный сенсор для беспилотных автомобилей. По сравнению с лидаром и технологиями оптического зондирования, радары в основном нечувствительны к погодным условиям в окружающей среде, таким как туман, дождь, ветер, темнота или яркое солнце, но у них остаются нерешенные технические проблемы. Многие производители оборудования и серьезные игроки на рынке самоуправляемых автомобилей вкладывают средства в развитие радаров. Tesla в своих автомобилях использует радары в качестве основных датчиков.
На этом рынке можно отметить ключевых игроков — Bosch, Valeo, 6th sense, SDS, Toposens.
V2X
V2X (Vehicle-to-everything) означает передачу информации между устройством и любым объектом, который может оказать влияние на это устройство. Системы V2X включают в себя такие коммуникационные технологии как устройство-устройство (vehicle-to-vehicle, V2V), устройство-инфраструктура (vehicle-to-infrastructure, V2I), устройство-пешеход (vehicle-to-pedestrian, V2P), устройство-сеть (vehicle-to-network, V2N).
Сегодня наиболее значимая проблема для развития V2X — требование в коммуникационных системах высокой надежности с маленькой задержкой. Здесь основными технологиями выступают IEEE 802.11p и Cellular V2X both, которые имеют свои преимущества и недостатки.
Несколько дней назад компания Ford анонсировала, что к 2022 году все их легковые и грузовые автомобили, продаваемые в Америке, будут снабжены технологиями C-V2X от компании Qualcomm. Также в рамках V2X недавно были представлены демонстрации, акцентирующие внимание придорожных элементах, что соответствует технологиям коммуникации устройство-инфраструктура.
Ключевые игроки: Continental (Германия), Qualcomm (США), NXP Semiconductors (Нидерланды), Robert Bosch (Германия), Denso (Япония) и Delphi Automotive (Великобритания).
Платформы для разработки
Nvidia — одна из немногих компаний, занимающихся созданием хардварных платформ, которые снабжены необходимыми вычислительными мощностями и оптимизированы под программное обеспечение для беспилотных автомобилей.
NVIDIA DRIVE AGX — открытая масштабируемая платформа для задач автономного вождения, которая выступает в качестве мозга для автономной машины. Единственная хардварная платформа такого рода, NVIDIA DRIVE AGX, обеспечивает высокопроизводительные, энергоэффективные вычисления для беспилотников на основе ИИ.
Программное обеспечение
Говоря про автономные средства передвижения, большое внимание уделяют “интеллекту” машины, её способности принимать решения. Как я уже говорил, программное обеспечение находится сейчас в центре внимания. Возможно, это связано с тем, что сейчас искусственный интеллект существует только в форме софта.
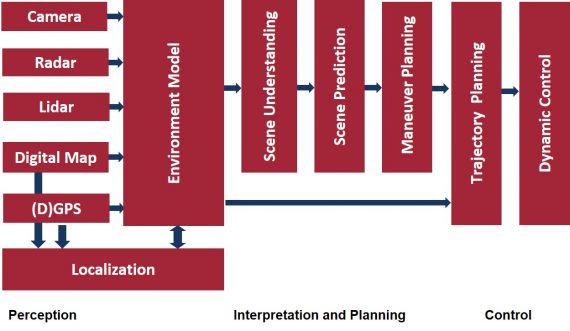
ADAS
Продвинутые системы помощи водителю (Advanced Driving-Assistance Systems, ADAS) включают в себя все алгоритмы, которые помогают выполнять задачи вождения. ADAS также содержит алгоритмы, которые являются частью автоматизированного вождения, а не только алгоритмы и софт, специально предназначенные для автономных транспортных средств. Основная часть ADAS софта может быть разделена на 3 большие группы: восприятие, планирование, контроль.
Восприятие
Восприятие — единственные связующе звено между машиной и окружающей средой. В алгоритмах восприятия зачастую используются нейронные сети, чтобы придавать смысл сырым входным данным с сенсоров (или данные V2X). Такие алгоритмы как детектирование объектов, отслеживание объектов, Sensor Fusion и Object Fusion находятся именно в этой части. Самые современные алгоритмы восприятия в большинстве своем основаны на глубоком обучении.
Планирование
Модуль планирования отвечает за способность машины принимать решения для достижения целей высшего порядка: доехать до определенной точки на карте, припарковаться в безопасном месте. Системы планирования работают благодаря объединению обработанной информации об окружающей среде (с выходов модуля планирования, то есть из сенсоров и компонент V2X) с установленными правилами и знаниями о том, как вести себя в этой среде.
Модуль планирования интенсивно использует карты и каталоги правил, которые определяют “правильные” действия во время вождения.
Контроль
Система контроля заботится о превращении намерений и целей, полученных из системы планирования, в действия. Система контроля подает на аппаратную часть (силовому приводу) необходимый входной сигнал, который приведет к желаемому действию (в соответствии с выходом с модуля планирования траектории). Модуль контроля делает движение более плавным и похожим на стиль езды человека.
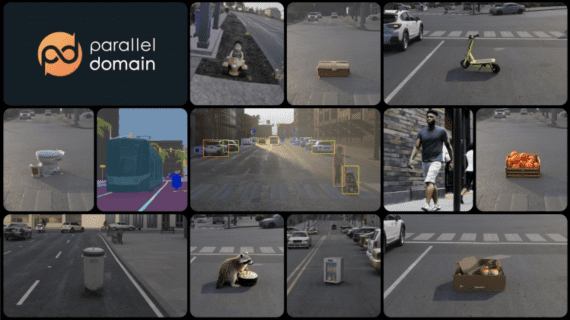
Виртуальное моделирование
Для создания сложных алгоритмов ИИ и получить удовлетворительные результаты, необходимы большие объемы данных. Однако цена сбора больших данных, а в особенности редко встречающихся сценариев вождения, очень высока. Это делает проблематичной тренировку моделей ИИ с использованием реальных дорожных условий.
Более того, чтобы показать, что беспилотные системы имеют небольшую вероятность попасть в аварию, требуются массовые испытания таких автомобилей. В результате получается замкнутый круг.
У этой проблемы есть решение — моделирование, или симуляция. Синтетические данные и часто используют для обучения больших моделей. Сейчас симуляции играют главную роль в мире автономного вождения. Обе проблемы — тренировка и валидация — могут быть решены при помощи синтетических данных (как только лишь с ними, так и в комбинации с данными из реального мира).
На виртуальном моделировании для автономного вождения специализируются несколько компаний: Automotive Artificial Intelligence (AAI), rFpro, NVIDIA.
Компании, тестирующие беспилотные автомобили
- Aptiv начал предлагать поездки на своей автономной машине на CES в январе 2018 года. 0 таких автомобилей уже есть на дорогах Лас-Вегаса; они курсируют на протяжении 20 часов в сутки, 7 дней в неделю.
- Aurora — стартап, который работает с Volkswagen, Hyundai, и Byton. Их беспилотные VW e-Golf и Lincoln MKZs сейчас курсируют по улицам Пало-Альто, Сан-Франциско и Питтсбурга.
- BMW работают с компанией Intel и Mobileye над частично и полностью автономными машинами. Немецкий автопроизводитель сотрудничает также с Waymo, чтобы использовать её технологии обработки данных с сенсоров, связи и искусственного интеллекта. Кроме того, ходят слухи, что BMW и Daimler планируют объединить усилия в области беспилотных авто.
- General Motors имеет собственную компанию разработки беспилотных авто Cruise с 2016 года. Их машины третьего уровня автономности Chevy Bolt обкатывают дороги Сан-Франциско, Скоттсдейла, Аризоны, Ориона и Мичигана.
- Drive.ai уже предлагает услуги с беспилотными автомобилями на двух территориях в Техасе — Фриско и Арлингтоне; оба эти города находятся в Далласе, Форт-Уэст. Оба сервиса используют беспилотные фургоны с водителями для безопасности, чтобы подвозить людей в пределах определенной геозоны. Пионер в области глубокого обучения и профессор, Эндрю Ын, является членом правления Drive.ai, которая которая подняла более чем 77 миллионов евро инвестиций.
- Ford для разработки собственных беспилотных автомобилей работает с компанией Argo AI. Компания имеет свои автомобили в Дирборне, штат Мичиган, в Майами и Питтсбурге. На прошлой неделе VW анонсировала коллаборацию с Ford в области электрических и беспилотных технологий.
- Tesla все выпущенные автомобили оснащает необходимым железом для полной работы автономных систем. Компания уже представила свой автопилот с некоторой степенью автономности.
- Машины Uber будут курсировать в беспилотном режиме по дороге в Питтсбург. В компании говорят, что эти автомобили будут ездить только по будням и в дневное время суток, но они со временем смогут расширить испытательную территорию и погодные условия. Uber завершила эксперименты с беспилотниками после трагической аварии, в которой погибла женщина в первой половине 2018 года. Недавно они объявили о возобновлении программы.
- Yandex в настоящее время тестирует свои автомобили в двух городах России. Они первыми в Европе предложили коммерческие услуги с использованием беспилотных авто.
- Volvo также инвестирует значительные средства в автономные машины, а также в грузовики. Недавно они анонсировали, что их беспилотный прототип возвращается на дорогу, и на этот раз шведский автопроизводитель будет тестировать их в Швеции. По сообщениям Veoneer, с которым Volvo находится в партнерстве по разработке автономных машин, шведские власти разрешили совместному предприятию проводить тестирования на дорогах страны.
- Waymo от Google — одна из нескольких компаний, двигающихся в очень быстром темпе. Уже сейчас беспилотные автомобили от Waymo коммерчески доступны.
В настоящий момент все больше компаний тестируют свои автономные разработки. Я рассказал лишь о нескольких компаниях, но полный список этим не ограничивается.
Подводя итог, 2019 год станет захватывающим годом, который, как ожидается, принесет многое в области развития автономного вождения. Но пока точно неизвестно, появятся ли беспилотные автомобили повсеместно на дорогах общего пользования, или же для этой амбициозной цели понадобится новый технологический рывок.
Автор статьи — Dane Mitrev.