Беспилотное управление, виртуальная реальность, общение человека с компьютером, видеонаблюдение – области, в которых возможность определять позу человека на изображении играет ключевую роль. Значительные достижения в этой сфере были сделаны благодаря применению свёрточных нейронных сетей (Convolutional neural networks — CNN). Однако задача остаётся нерешённой для непостановочных сцен: трудно определить точную позу человека по изображению, снятому в естественных условиях.
Предлагаемый метод
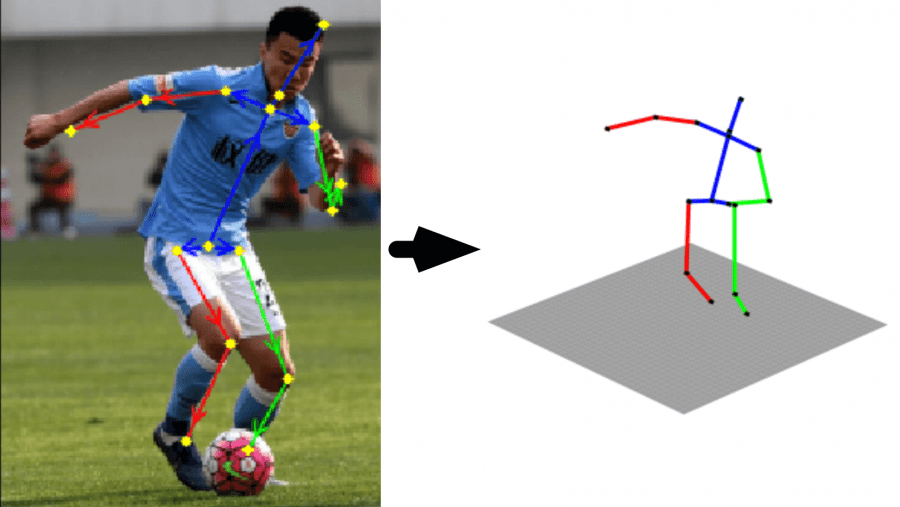
Группа исследователей из города Шэньчжэнь (Китай) предложили новый метод для определения позы человека на изображении. А именно, они предлагают использовать информацию об удалённости каждой части человеческого тела от камеры. Они назвали эту информацию Forward-or-Backward Information (FBI).
В рамках рассматриваемого метода используется свёрточная нейросеть с двумя ветвями: первая ответственна за маркирование суставов тела на изображении, а вторая – за работу с FBI. Стоит отметить, что существует несколько современных методов, использующих только информацию о положении суставов для определения позы человека. Однако, такой метод некорректен, так как различным позам может соответствовать одно и то же расположение суставов на изображении. В свою очередь, использование информации о расположении суставов в совокупности с данными о расстоянии между камерой и различными частями тела позволяет определить положение суставов уже в трёхмерном пространстве. На основе этих рассуждений авторы полагают, что анализ двух рассмотренных типов информации в глубокой регресcионной нейросети позволит предсказывать расположение суставов с более высокой точностью.
Датасет
Для стабилизации обучения нейросети исследователи разработали специальный пользовательский интерфейс, с помощью которого маркировали FBI для 12,000 изображений. Задача была сведена к определению положения 14 частей тела в соответствии с тремя состояниями: близко, далеко, параллельно относительно плоскости изображения.
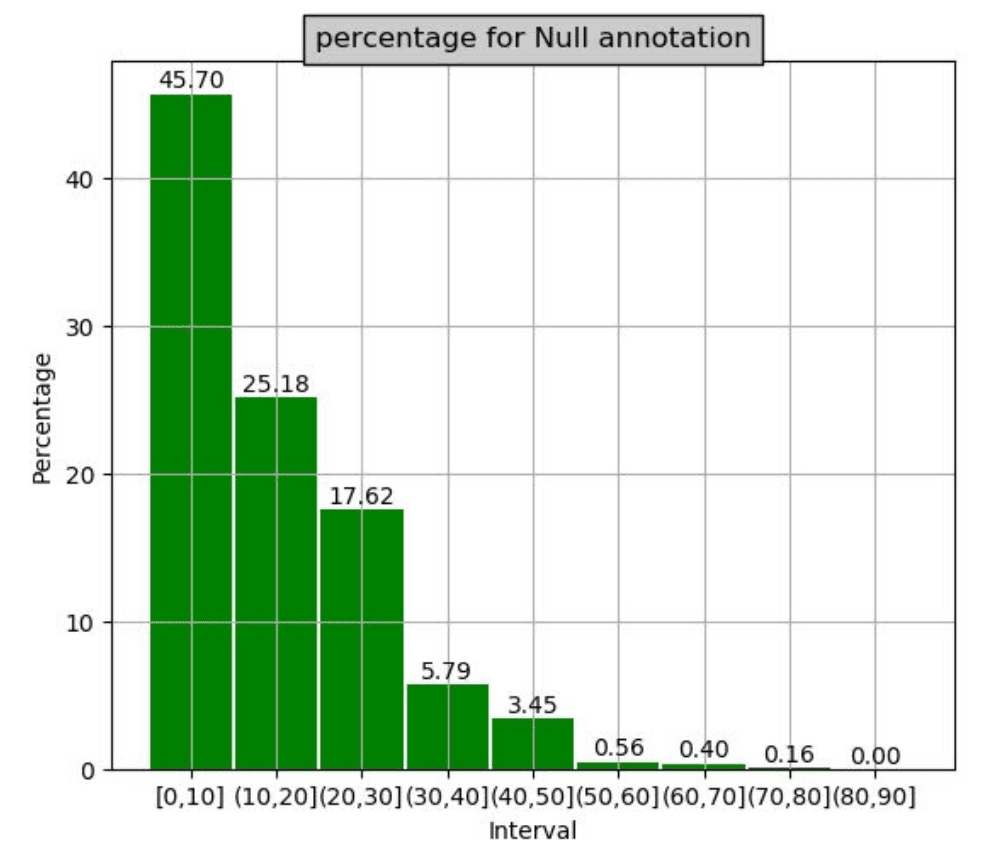
Для составления тренировочного датасета FBI были наняты люди, которые отмечали на произвольных изображениях из датасета MPII расположение частей тела по следующим критериям: «спереди», «позади» или «положение не определено» (подразумевается, что дать точный ответ затруднительно в виду параллельности части тела плоскости изображения). 20% всех отметок относились к критерию «положение не определено». График выше показывает распределение числа таких отметок по углам отклонения плоскости части тела относительно плоскости изображения. Как и можно было ожидать, люди чаще отмечают неопределённость, когда конечность почти параллельна к плоскости изображения.
Архитектура нейросети
Теперь давайте рассмотрим структуру используемой нейросети более детально.
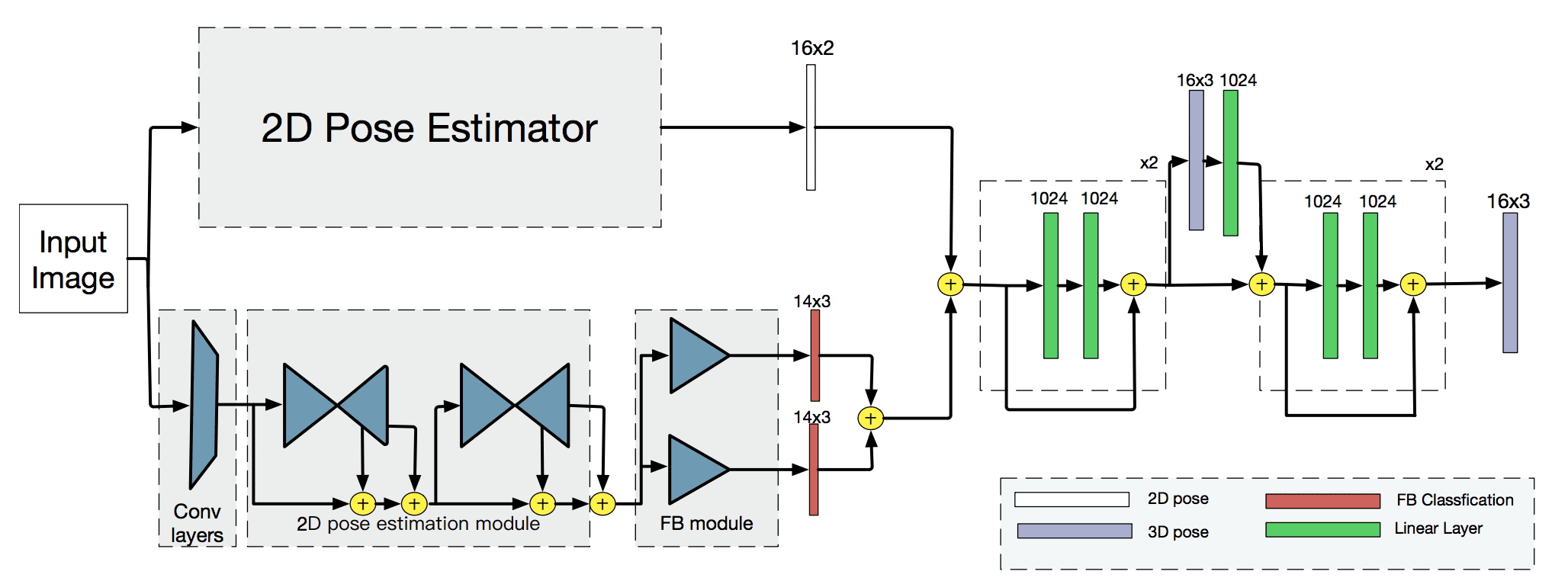
Нейросеть имеет три составляющие:
- Pose Estimator — блок, ответственный за первичную оценку позы человека на изображении. Он принимает на вход изображение и выдаёт двумерную карту расположений 16 суставов человека на изображении.
- Определитель FBI. Эта часть принимает на вход изображение и выдаёт FBI 14-ти частей тела, разделённых по критериям «спереди», «позади» или «положение не определено». Эта часть нейросети начинается с последовательности свёрточных слоёв, за которыми следуют два последовательно расположенных модуля архитектуры hourglass. Полученные карты особенностей затем пропускаются через набор свёрточных слоёв, полностью соединённые слои и softmax-слой, благодаря чему на выходе мы получаем результат классификации по трём рассматриваемым критериям.
- Определитель позы (Pose Regressor – PR). В этой части регресионная нейросеть выявляет трёхмерные координаты суставов, принимая на вход их двумерные координаты и FBI. Чтобы учесть как можно больше информации, PR дополнительно принимает на вход матрицу вероятности, сгенерированную softmax-слоем. Таким образом, матрица двумерных координат и матрица вероятности соединяются, и с помощью полученной матрицы и двух каскадных блоков определяются трёхмерные координаты суставов, а следовательно, и расположения частей тела в трёхмерном пространстве.
Сравнение с существующими методами
Количественное сравнение было проведено на основе Human3.6M – датасета, содержащего 3.6 миллиона RGB изображений 7 профессиональных актёров, выполняющих 15 различных действий (прогулка, принятие пищи, сидение и т.д.). Средняя ошибка в определении позиции сустава (mean per joint position error – MPJPE) была использована как оценочная метрика. Результаты представлены в таблице 1.
![Таблица 1. Качественное сравнение на основе MPJPE. Ordinal [19] – работа, схожая с предлагаемым методом. Наилучший результат без учёта этой работы помечен синим. Чёрным выделены наилучшие результаты с учётом это й работы.](https://neurohive.io/wp-content/uploads/2018/07/table1.png)
![Таблица 2. Количественное сравнение, основанное на MPJPE после rigid transformation. Ordinal [19] – смежная с предлагаемым методом работа. Наилучший результат без учёта этой работы помечен синим. Чёрным выделены наилучшие результаты с учётом этой работы](https://neurohive.io/wp-content/uploads/2018/07/table2.png)
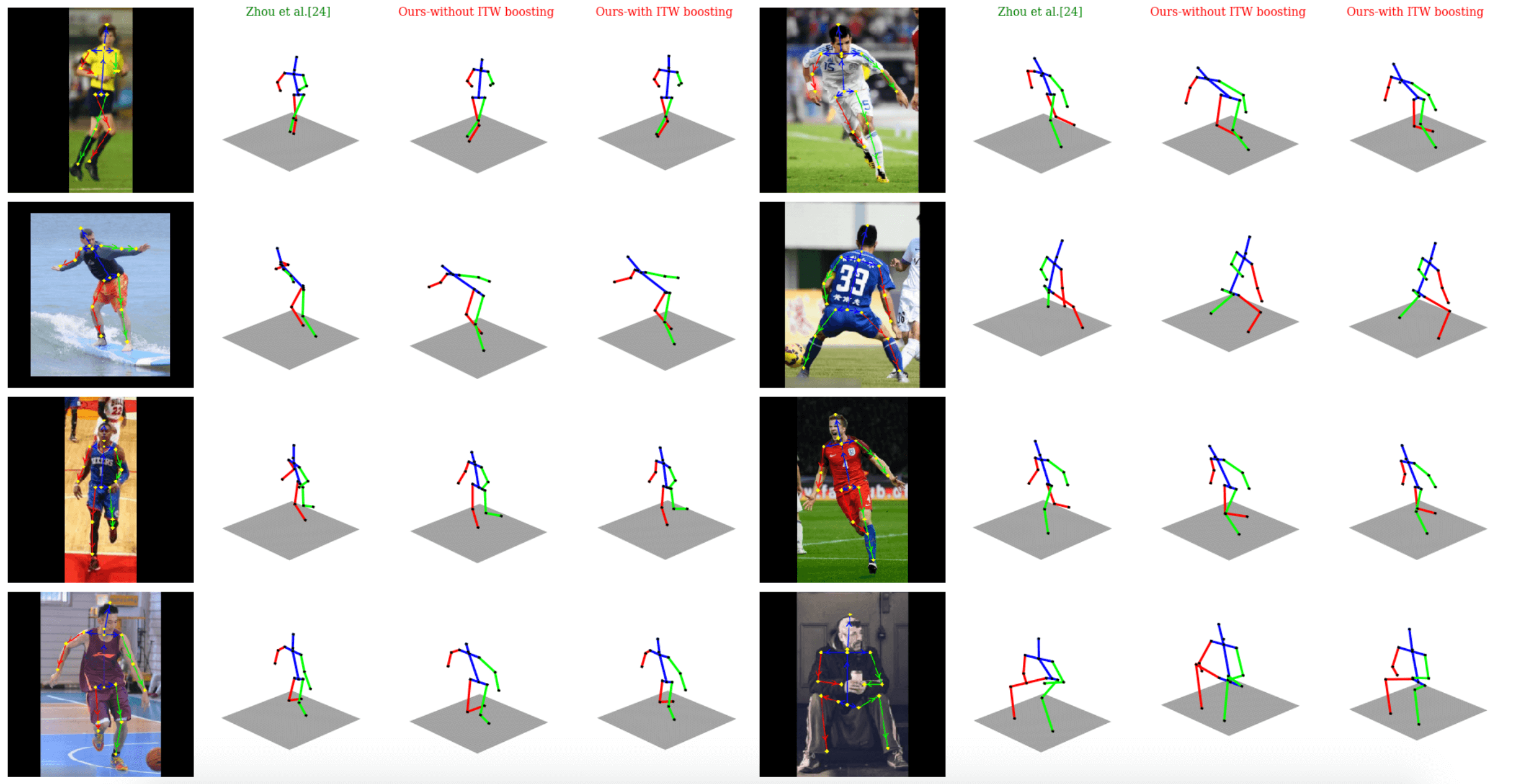
Для подтверждения эффективности предлагаемого метода при работе с непостановочными изображениями, исследователи взяли 100 изображений из своего FBI-датасета и провели ещё одно сравнение с методом, предлагаемым Zhou и коллегами. В этом случае в качестве оценочной метрики был выбран коэффициент корректности FBI, полученной после распознавания позы. Метод Zhou и коллег показал коэффициент правильности 75%, в то время как рассматриваемый подход достиг результата в 78%. Кроме того, на рисунке ниже представлены результаты качественного сравнения этих методов.
В сухом остатке
Для более точного определения позы человека предлагаемый подход предполагает использование нового типа информации, названного Forward-or-Backward Information (FBI), благодаря чему он превосходит все ранее используемые техники. Кроме того, в рамках этой работы был сделан ещё один существенный вклад в развитие машинного обучения: создан датасет из 12,000 изображений с маркированной FBI. Датасет будет выложен в открытый доступ с целью помочь другим исследователям, работающим в области распознавания образов.