Когда Ouster начали разрабатывать свой лидар три года назад, было очевидно, что исследования в сфере глубокого обучения для камер превзошли исследования по лидарам. Данные лидара обладают невероятными преимуществами: богатая пространственная информация и высокая светочувствительность. Однако им не хватает исходного разрешения и эффективной структуры массива изображений, а трехмерные облака точек по-прежнему сложно использовать в нейросетях или обрабатывать с помощью аппаратного ускорения.
Ouster — старт-ап из Сан-Франциско, конструирующий 3D-сенсоры, которые сделают мир будущего намного безопаснее. По крайней мере, так утверждают сами разработчики.
Как работает лидар
Лидар — активный дальномер оптического диапазона, который формирует трёхмерную картину окружающего пространства. Работает по принципу эхолота. На открытых пространствах в качестве излучателя используется лазер, в закрытых помещениях достаточно обычного светодиода. Лидары разрабатываются с 1960-х годов.
Обычная цифровая видеокамера делает изображения с более высоким разрешением, но не дает точную информацию о расстоянии до объектов и плохо работает при слабом освещении.
Разработчики Ouster решили взять только лучшее от камер и лидаров, объединив это в одном устройстве. Лидар Ouster OS-1 выдает изображения с фиксированной разрешающей способностью. Слои данных пространственно коррелированы, без временных несоответствий или шаттер эффектов, имеют 16 бит на пиксель и линейную фотоотраженность.
-

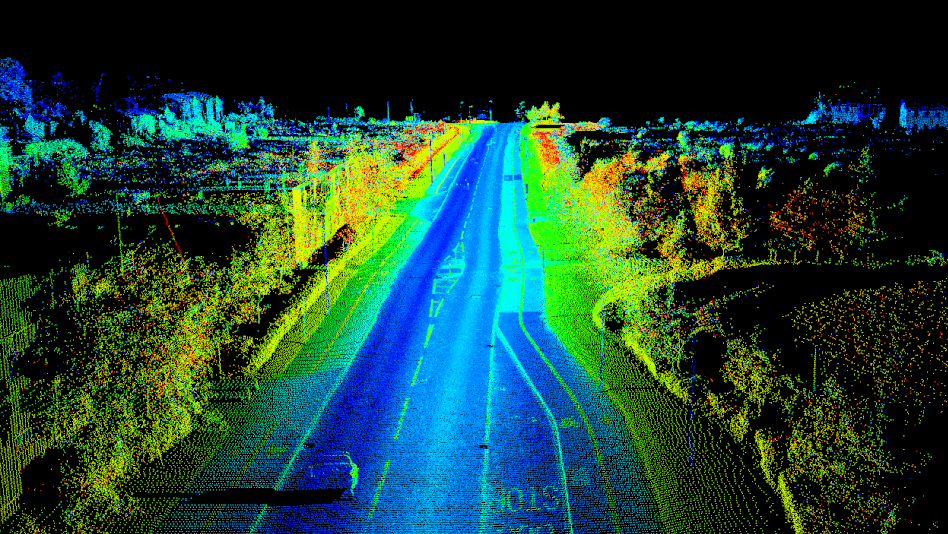
Одновременные уровни изображения в реальном времени выводятся из OS-1. То, что вы видите сверху донизу, это данные окружающего мира, интенсивности, дальности и облака точек — ВСЕ от лидара. Обратите внимание, что окружающее изображение захватывает облачное небо и тени от деревьев и транспортных средств

Оптическая система OS-1 имеет большую диафрагму, чем большинство DSLR, а разработанный метод подсчета фотонов ASIC настроен на повышенную чувствительность, поэтому окружающие изображения получаются детальными даже в условиях низкой освещенности. OS-1 фиксирует как прямые сигналы, так и скрытые данные (ambient data) в ближнем инфракрасном диапазоне, поэтому данные напоминают видимые освещенные изображения тех же сцен. Поэтому есть вероятность, что алгоритмы, разработанные для камер, хорошо будут работать с данными из лидара.
Open source визуализатор
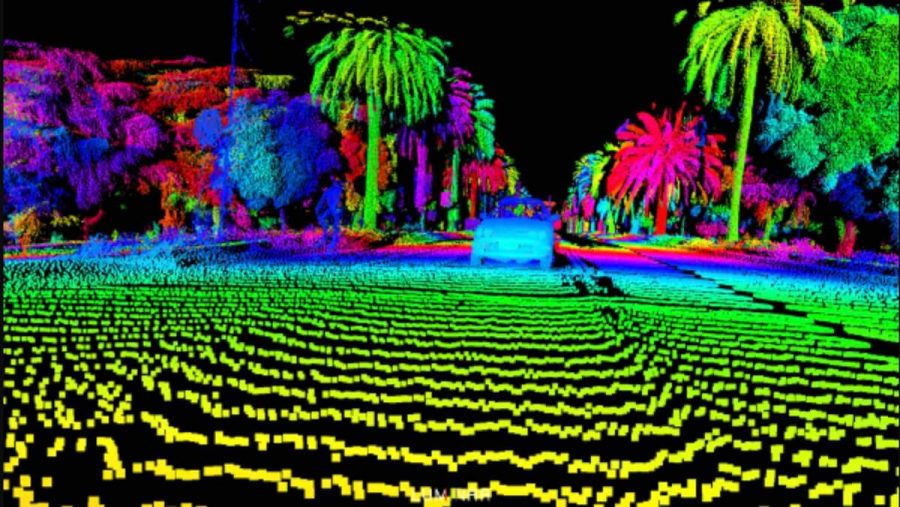
Также разработчики обновляют open-source драйвер для лидара OS-1, чтобы он выдавал слои данных в фиксированном разрешении с панорамным обзором в 360. Помимо этого создатели представляют новый, встроенный в VTK, кросс-платформенный инструмент для визуализации, для просмотра, записи и воспроизведения, как изображений, так и облаков точек. Выходные данные сенсора не требуют пост-процессинга, чтобы показывать заявленную функциональность, все происходит в аппаратной части, а драйвер просто собирает потоки пакетов данных в изображения.
-
Новый open-source визуализатор

Обучение нейросети на данных с лидара
Так как сенсор выдает фиксированное разрешение кадров, с глубиной, сигналами и эмбиент данными для каждого пикселя, это позволяет использовать данные в алгоритмах глубокого обучения, которые специально разрабатывались для камер. Создатели закодировали глубину, интенсивность и эмбиент информацию в вектор почти таким же образом, как это делается для синего, красного и зеленого каналов во входном слое. Нейросеть, которая была обучена на данных с камеры, обобщается на тип данных, которые предоставляет лидар.
Как один из примеров, исследователи натренировали попиксельный семантичесский классификатор, который определяет дорогу, транспорт, пешеходов и велосипедистов по набору кадров глубин и интенсивностей. Итоговая нейросеть была запущена на NVIDIA GTX 1060 в реальном времени и показала впечатляющие результаты, особенно, если учитывать, что это первая попытка.
-
Семантическая сегментация данных с лидара: https://www.youtube.com/watch?v=JxR9MasA9Yc

Так как все данные попиксельные, есть возможность производить дополнительную обработку данных и накладывать на трехмерные изображения двумерные маски такие как границы машин.

В другом случае создатели решили не объединять данные в вектор, а оставить их разделенными и прогнать их через ту же нейросеть по отдельности.
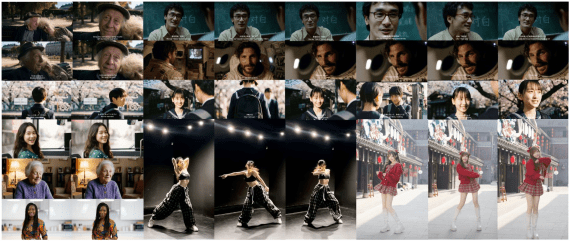
Как пример они использовали предобученную нейросеть SuperPoint project от DeTone и запустили напрямую на их изображениях глубины и интенсивности. Нейросеть обучена на большом количестве RGB изображений и никогда не видела данные с лидара, но результаты на интенсивности и глубине поражают.
- При внимательном обзоре, становится понятно, то нейросеть выделяет разные ключевые точки на каждом изображении. Тот, кто работал над лидарной и визуальной одометриями, поймет ценность избыточности, воплощенной в этом результате. Лидарная одометрия используется в геометрически однородных средах, например туннелях, тогда как визуальная одометрия применяется в открытых или плохо освещенных средах. Камера-лидар предоставляет мультимодальное решение для этой задачи.
 При внимательном обзоре, становится понятно, то нейросеть выделяет разные ключевые точки на каждом изображении. Тот, кто работал над лидарной и визуальной одометриями, поймет ценность избыточности, воплощенной в этом результате. Лидарная одометрия используется в геометрически однородных средах, например туннелях, тогда как визуальная одометрия применяется в открытых или плохо освещенных средах. Камера-лидар предоставляет мультимодальное решение для этой задачи.
При внимательном обзоре, становится понятно, то нейросеть выделяет разные ключевые точки на каждом изображении. Тот, кто работал над лидарной и визуальной одометриями, поймет ценность избыточности, воплощенной в этом результате. Лидарная одометрия используется в геометрически однородных средах, например туннелях, тогда как визуальная одометрия применяется в открытых или плохо освещенных средах. Камера-лидар предоставляет мультимодальное решение для этой задачи.Полученные результаты дают уверенность в том, что синергия данных с камеры и лидара нечто большее, чем просто сумма двух наборов данных.
Ссылки:
1. Видео
Интересные статьи:
- Оценка глубины на изображении при помощи Encoder-Decoder сетей
- Kepler.gl — мощный инструмент визуализации карт от Uber с открытым исходным кодом
- Сегментация объектов на видео в реальном времени с помощью Pixel-Wise обучения