Claude Sonnet 4.5 Leads on Comprehensive Backend Benchmark, Outperforming in Both Code and Environment Configuration
22 January 2026
Claude Sonnet 4.5 Leads on Comprehensive Backend Benchmark, Outperforming in Both Code and Environment Configuration
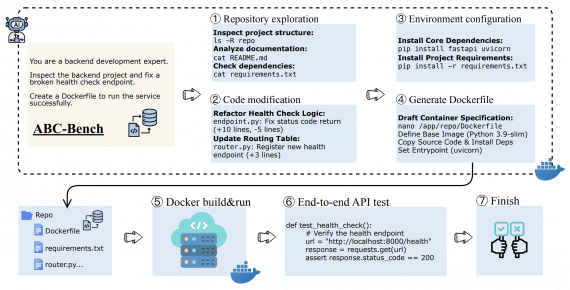
A team of researchers from Fudan University and Shanghai Qiji Zhifeng Co. introduced ABC-Bench — the first benchmark that tests the ability of AI agents to solve full-fledged backend development…