Модель MIT осуществляет предсказание траектории передвигающихся рядом с беспилотником участников дорожного движения в реальном времени. Алгоритм создан с целью повысить безопасность использования беспилотных автомобилей.
Современные методы анализа дорожного движения либо слишком упрощены (например, предполагают, что пешеходы всегда движутся по прямой), либо слишком консервативны, либо могут прогнозировать только поведение одного агента. В алгоритме MIT задача предсказания траектории нескольких агентов разбивается на маленькие подзадачи, что позволяет параллельно решать их в реальном времени.
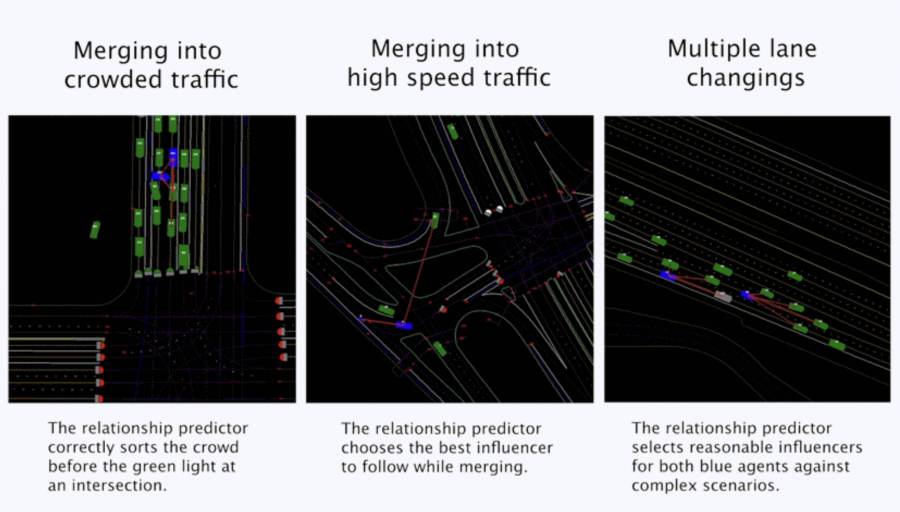
Система сначала определяет отношения между двумя участниками дорожного движения – какой автомобиль, велосипедист или пешеход имеет право проезда, и какой агент уступит ему дорогу – и использует эти отношения для прогнозирования будущих траекторий нескольких агентов.
В качестве входных данных алгоритма используются предыдущие траектории агентов и карта с расположением улиц и конфигурацией полос движения. Используя эту информацию, модель определяет, какой из двух агентов имеет право проезда первым, и предсказывает его траекторию, поскольку этот агент является независимым. Затем прогнозируется траектория второго, зависимого агента. Модель строит прогноз в реальном времени на 8 последующих секунд.