SenseNova-U1: NEO-unify multimodal architecture works directly with pixels without VAE
14 May 2026
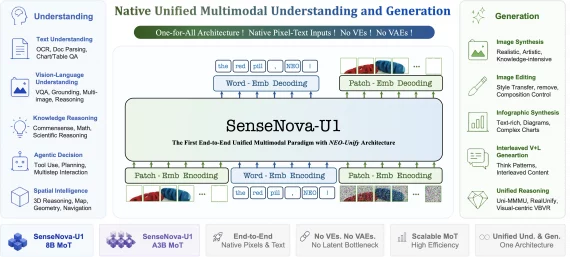
SenseNova-U1: NEO-unify multimodal architecture works directly with pixels without VAE
SenseNova introduced a new multimodal architecture, SenseNova-U1, which combines image understanding, generation, and editing inside a single transformer without a separate visual encoder or variational autoencoder. This approach removes the…